54 Repositories
Latest Python Libraries
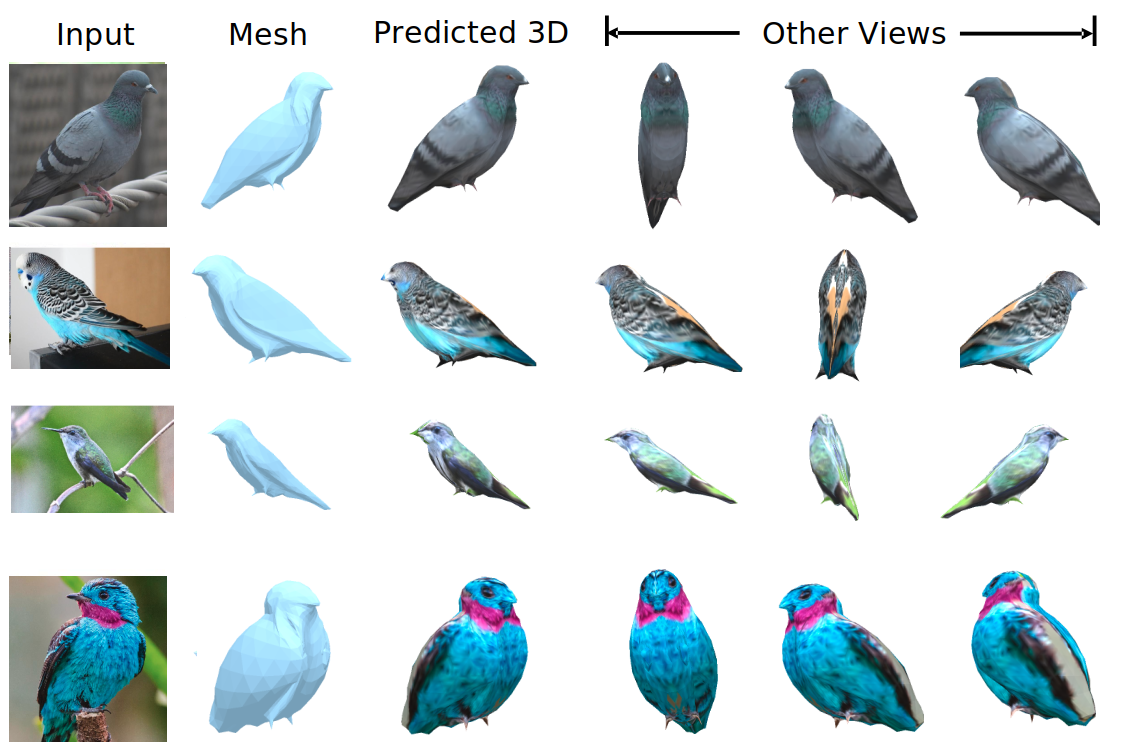
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022

Fast and robust clustering of point clouds generated with a Velodyne sensor.
Depth Clustering This is a fast and robust algorithm to segment point clouds taken with Velodyne sensor into objects. It works with all available Velo
957 Dec 21, 2022

Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks
Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks This is a Pytorch-Lightning implementation of the paper "Self-s
111 Dec 06, 2022

Point-NeRF: Point-based Neural Radiance Fields
Point-NeRF: Point-based Neural Radiance Fields Project Sites | Paper | Primary c
 662 Jan 01, 2023
662 Jan 01, 2023

pytorch implementation of the ICCV'21 paper "MVTN: Multi-View Transformation Network for 3D Shape Recognition"
MVTN: Multi-View Transformation Network for 3D Shape Recognition (ICCV 2021) By Abdullah Hamdi, Silvio Giancola, Bernard Ghanem Paper | Video | Tutori
 64 Jan 03, 2023
64 Jan 03, 2023

Neural Point-Based Graphics
Neural Point-Based Graphics Project Video Paper Neural Point-Based Graphics Kara-Ali Aliev1 Artem Sevastopolsky1,2 Maria Kolos1,2 Dmitry Ulyanov3
 252 Dec 13, 2022
252 Dec 13, 2022

UI for converting various point cloud file formats
Point cloud format converter This coverter based on open3d. If you're using old ROS1 i suggest to use conda python3 evn to install requirements. Todo
 1 Oct 29, 2021
1 Oct 29, 2021

3D cascade RCNN for object detection on point cloud
3D Cascade RCNN This is the implementation of 3D Cascade RCNN: High Quality Object Detection in Point Clouds. We designed a 3D object detection model
 22 Dec 02, 2022
22 Dec 02, 2022

PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Created by Charles R. Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas from Sta
 4k Dec 30, 2022
4k Dec 30, 2022

Code for the SIGGRAPH 2022 paper "DeltaConv: Anisotropic Operators for Geometric Deep Learning on Point Clouds."
DeltaConv [Paper] [Project page] Code for the SIGGRAPH 2022 paper "DeltaConv: Anisotropic Operators for Geometric Deep Learning on Point Clouds" by Ru
 98 Nov 26, 2022
98 Nov 26, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

(CVPR 2022 Oral) Official implementation for "Surface Representation for Point Clouds"
RepSurf - Surface Representation for Point Clouds [CVPR 2022 Oral] By Haoxi Ran* , Jun Liu, Chengjie Wang ( * : corresponding contact) The pytorch off
 264 Dec 23, 2022
264 Dec 23, 2022
![[CVPR 2021] Scan2Cap: Context-aware Dense Captioning in RGB-D Scans](https://github.com/daveredrum/Scan2Cap/raw/main/demo/Scan2Cap.gif)
[CVPR 2021] Scan2Cap: Context-aware Dense Captioning in RGB-D Scans
Scan2Cap: Context-aware Dense Captioning in RGB-D Scans Introduction We introduce the task of dense captioning in 3D scans from commodity RGB-D sensor
 79 Nov 07, 2022
79 Nov 07, 2022
PyTorch implementation of Pointnet2/Pointnet++
Pointnet2/Pointnet++ PyTorch Project Status: Unmaintained. Due to finite time, I have no plans to update this code and I will not be responding to iss
 1.2k Dec 29, 2022
1.2k Dec 29, 2022

A Python library for common tasks on 3D point clouds
Point Cloud Utils (pcu) - A Python library for common tasks on 3D point clouds Point Cloud Utils (pcu) is a utility library providing the following fu
 622 Dec 27, 2022
622 Dec 27, 2022
Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in 3D.
ApproxMVBB Status Build UnitTests Homepage Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in
 390 Dec 31, 2022
390 Dec 31, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022

PyTorch Code for "Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning"
Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning [Project Page] [Paper] Wenlong Huang1, Igor Mordatch2, Pieter Abbeel1,
 40 Nov 22, 2022
40 Nov 22, 2022

Implementation of CVPR'2022:Reconstructing Surfaces for Sparse Point Clouds with On-Surface Priors
Reconstructing Surfaces for Sparse Point Clouds with On-Surface Priors (CVPR 2022) Personal Web Pages | Paper | Project Page This repository contains
 151 Dec 26, 2022
151 Dec 26, 2022

Implementation of CVPR'2022:Surface Reconstruction from Point Clouds by Learning Predictive Context Priors
Surface Reconstruction from Point Clouds by Learning Predictive Context Priors (CVPR 2022) Personal Web Pages | Paper | Project Page This repository c
136 Dec 12, 2022
3D Vision functions with end-to-end support for deep learning developers, written in Ivy.
Ivy vision focuses predominantly on 3D vision, with functions for camera geometry, image projections, co-ordinate frame transformations, forward warping, inverse warping, optical flow, depth triangul
 61 Dec 29, 2022
61 Dec 29, 2022

MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition
MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition Paper: MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition accepted fo
 64 Dec 18, 2022
64 Dec 18, 2022

EgoNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale
EgonNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale Paper: EgoNN: Egocentric Neural Network for Point Cloud
19 Sep 20, 2022

Code for the paper "Benchmarking and Analyzing Point Cloud Classification under Corruptions"
ModelNet-C Code for the paper "Benchmarking and Analyzing Point Cloud Classification under Corruptions". For the latest updates, see: sites.google.com
 45 Dec 28, 2022
45 Dec 28, 2022

Real-time LIDAR-based Urban Road and Sidewalk detection for Autonomous Vehicles 🚗
urban_road_filter: a real-time LIDAR-based urban road and sidewalk detection algorithm for autonomous vehicles Dependency ROS (tested with Kinetic and
 180 Dec 12, 2022
180 Dec 12, 2022

Mix3D: Out-of-Context Data Augmentation for 3D Scenes (3DV 2021)
Mix3D: Out-of-Context Data Augmentation for 3D Scenes (3DV 2021) Alexey Nekrasov*, Jonas Schult*, Or Litany, Bastian Leibe, Francis Engelmann Mix3D is
 189 Dec 26, 2022
189 Dec 26, 2022
6D Grasping Policy for Point Clouds
GA-DDPG [website, paper] Installation git clone https://github.com/liruiw/GA-DDPG.git --recursive Setup: Ubuntu 16.04 or above, CUDA 10.0 or above, py
 48 Dec 21, 2022
48 Dec 21, 2022

Implementation of the Point Transformer layer, in Pytorch
Point Transformer - Pytorch Implementation of the Point Transformer self-attention layer, in Pytorch. The simple circuit above seemed to have allowed
 501 Jan 03, 2023
501 Jan 03, 2023

Diffusion Probabilistic Models for 3D Point Cloud Generation (CVPR 2021)
Diffusion Probabilistic Models for 3D Point Cloud Generation [Paper] [Code] The official code repository for our CVPR 2021 paper "Diffusion Probabilis
 323 Jan 05, 2023
323 Jan 05, 2023
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering This repository holds all the code and data for our recent work on
 118 Dec 06, 2022
118 Dec 06, 2022

Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021)
Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021) An efficient PyTorch library for Point Cloud Completion.
 119 Jan 02, 2023
119 Jan 02, 2023

PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition, CVPR 2018
PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place
 294 Dec 12, 2022
294 Dec 12, 2022

Official Implementation (PyTorch) of "Point Cloud Augmentation with Weighted Local Transformations", ICCV 2021
PointWOLF: Point Cloud Augmentation with Weighted Local Transformations This repository is the implementation of PointWOLF(To appear). Sihyeon Kim1*,
 16 Nov 03, 2022
16 Nov 03, 2022
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 07, 2023
625 Jan 07, 2023
Real-time ground filtering algorithm of cloud points acquired using Terrestrial Laser Scanner (TLS)
This repository contains tools to simulate the ground filtering process of a registered point cloud. The repository contains two filtering methods. The first method uses a normal vector, and fit to p
 5 Aug 25, 2022
5 Aug 25, 2022

Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds (CVPR 2022, Oral)
Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds (CVPR 2022, Oral) This is the official implementat
 259 Dec 25, 2022
259 Dec 25, 2022

Official Implementation for the "An Empirical Investigation of 3D Anomaly Detection and Segmentation" paper.
An Empirical Investigation of 3D Anomaly Detection and Segmentation Project | Paper Official PyTorch Implementation for the "An Empirical Investigatio
 55 Dec 14, 2022
55 Dec 14, 2022
Official implementation of "CrossPoint: Self-Supervised Cross-Modal Contrastive Learning for 3D Point Cloud Understanding" (CVPR, 2022)
CrossPoint: Self-Supervised Cross-Modal Contrastive Learning for 3D Point Cloud Understanding (CVPR'22) Paper Link | Project Page Abstract : Manual an
 152 Dec 23, 2022
152 Dec 23, 2022

Official source code of Fast Point Transformer, CVPR 2022
Fast Point Transformer Project Page | Paper This repository contains the official source code and data for our paper: Fast Point Transformer Chunghyun
 182 Dec 23, 2022
182 Dec 23, 2022
MMDetection3D is an open source object detection toolbox based on PyTorch
MMDetection3D is an open source object detection toolbox based on PyTorch, towards the next-generation platform for general 3D detection. It is a part of the OpenMMLab project developed by MMLab.
 3.2k Jan 05, 2023
3.2k Jan 05, 2023
A general 3D Object Detection codebase in PyTorch.
Det3D is the first 3D Object Detection toolbox which provides off the box implementations of many 3D object detection algorithms such as PointPillars, SECOND, PIXOR, etc, as well as state-of-the-art
 1.4k Jan 05, 2023
1.4k Jan 05, 2023

Official Code for ICML 2021 paper "Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline"
Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline Ankit Goyal, Hei Law, Bowei Liu, Alejandro Newell, Jia Deng Internati
 115 Jan 04, 2023
115 Jan 04, 2023

Deep Surface Reconstruction from Point Clouds with Visibility Information
Data, code and pretrained models for the paper Deep Surface Reconstruction from Point Clouds with Visibility Information.
 23 Jan 04, 2023
23 Jan 04, 2023

Official PyTorch code for the paper: "Point-Based Modeling of Human Clothing" (ICCV 2021)
Point-Based Modeling of Human Clothing Paper | Project page | Video This is an official PyTorch code repository of the paper "Point-Based Modeling of
 64 Nov 22, 2022
64 Nov 22, 2022

Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
Part-Aware Data Augmentation for 3D Object Detection in Point Cloud This repository contains a reference implementation of our Part-Aware Data Augment
 62 Jan 03, 2023
62 Jan 03, 2023

OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
OpenPCDet OpenPCDet is a clear, simple, self-contained open source project for LiDAR-based 3D object detection. It is also the official code release o
3.2k Dec 31, 2022

Stratified Transformer for 3D Point Cloud Segmentation (CVPR 2022)
Stratified Transformer for 3D Point Cloud Segmentation Xin Lai*, Jianhui Liu*, Li Jiang, Liwei Wang, Hengshuang Zhao, Shu Liu, Xiaojuan Qi, Jiaya Jia
 195 Jan 01, 2023
195 Jan 01, 2023
Spatial Sparse Convolution Library
SpConv: Spatially Sparse Convolution Library PyPI Install Downloads CPU (Linux Only) pip install spconv CUDA 10.2 pip install spconv-cu102 CUDA 11.1 p
 1.2k Jan 07, 2023
1.2k Jan 07, 2023
A general and strong 3D object detection codebase that supports more methods, datasets and tools (debugging, recording and analysis).
ALLINONE-Det ALLINONE-Det is a general and strong 3D object detection codebase built on OpenPCDet, which supports more methods, datasets and tools (de
 5 Nov 03, 2022
5 Nov 03, 2022
![[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation](https://github.com/wenbowen123/catgrasp/raw/master/media/intro.jpg)
[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation
This is the official implementation of our paper: Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-R
 199 Jan 04, 2023
199 Jan 04, 2023
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
PointCNN: Convolution On X-Transformed Points Created by Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xinhan Di, and Baoquan Chen. Introduction PointCNN
 1.3k Dec 21, 2022
1.3k Dec 21, 2022
An inofficial PyTorch implementation of PREDATOR based on KPConv.
PREDATOR: Registration of 3D Point Clouds with Low Overlap An inofficial PyTorch implementation of PREDATOR based on KPConv. The code has been tested
 14 Aug 03, 2022
14 Aug 03, 2022
Point Cloud Registration using Representative Overlapping Points.
Point Cloud Registration using Representative Overlapping Points (ROPNet) Abstract 3D point cloud registration is a fundamental task in robotics and c
36 Dec 16, 2022