PyGAS: Auto-Scaling GNNs in PyG
PyGAS is the practical realization of our GNNAutoScale (GAS) framework, which scales arbitrary message-passing GNNs to large graphs, as described in our paper:
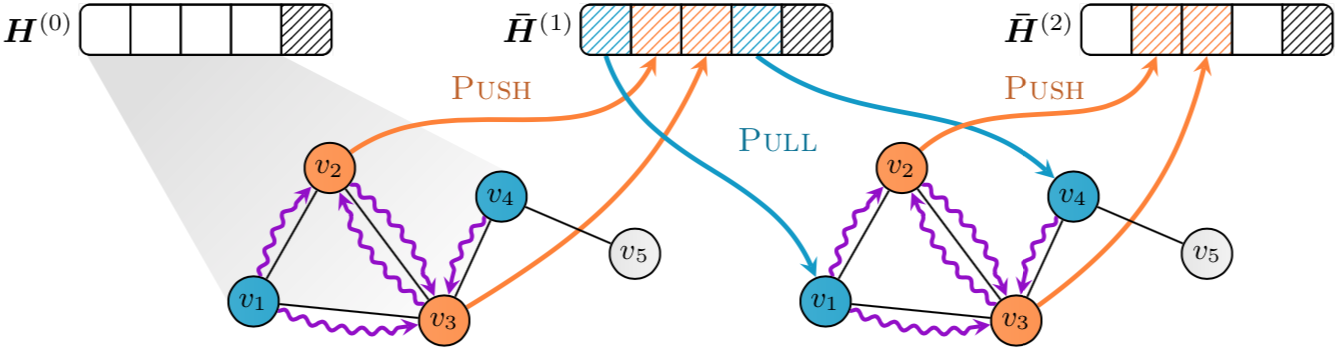
Matthias Fey, Jan E. Lenssen, Frank Weichert, Jure Leskovec: GNNAutoScale: Scalable and Expressive Graph Neural Networks via Historical Embeddings (ICML 2021)
GAS prunes entire sub-trees of the computation graph by utilizing historical embeddings from prior training iterations, leading to constant GPU memory consumption in respect to input mini-batch size, and maximally expressivity.
PyGAS is implemented in PyTorch and utilizes the PyTorch Geometric (PyG) library. It provides an easy-to-use interface to convert a common or custom GNN from PyG into its scalable variant:
from torch_geometric.nn import SAGEConv
from torch_geometric_autoscale import ScalableGNN
from torch_geometric_autoscale import metis, permute, SubgraphLoader
class GNN(ScalableGNN):
def __init__(self, num_nodes, in_channels, hidden_channels,
out_channels, num_layers):
# * pool_size determines the number of pinned CPU buffers
# * buffer_size determines the size of pinned CPU buffers,
# i.e. the maximum number of out-of-mini-batch nodes
super().__init__(num_nodes, hidden_channels, num_layers,
pool_size=2, buffer_size=5000)
self.convs = ModuleList()
self.convs.append(SAGEConv(in_channels, hidden_channels))
for _ in range(num_layers - 2):
self.convs.append(SAGEConv(hidden_channels, hidden_channels))
self.convs.append(SAGEConv(hidden_channels, out_channels))
def forward(self, x, adj_t, *args):
for conv, history in zip(self.convs[:-1], self.histories):
x = conv(x, adj_t).relu_()
x = self.push_and_pull(history, x, *args)
return self.convs[-1](x, adj_t)
perm, ptr = metis(data.adj_t, num_parts=40, log=True)
data = permute(data, perm, log=True)
loader = SubgraphLoader(data, ptr, batch_size=10, shuffle=True)
model = GNN(...)
for batch, *args in loader:
out = model(batch.x, batch.adj_t, *args)
A detailed description of ScalableGNN can be found in its implementation.
Requirements
- Install PyTorch >= 1.7.0
- Install PyTorch Geometric >= 1.7.0:
pip install torch-scatter -f https://pytorch-geometric.com/whl/torch-${TORCH}+${CUDA}.html
pip install torch-sparse -f https://pytorch-geometric.com/whl/torch-${TORCH}+${CUDA}.html
pip install torch-geometric
where ${TORCH} should be replaced by either 1.7.0 or 1.8.0, and ${CUDA} should be replaced by either cpu, cu92, cu101, cu102, cu110 or cu111, depending on your PyTorch installation.
Installation
pip install git+https://github.com/rusty1s/pyg_autoscale.git
or
python setup.py install
Project Structure
torch_geometric_autoscale/contains the source code of PyGASexamples/contains examples to demonstrate how to apply GAS in practicesmall_benchmark/includes experiments to evaluate GAS performance on small-scale graphslarge_benchmark/includes experiments to evaluate GAS performance on large-scale graphs
We use Hydra to manage hyperparameter configurations.
Cite
Please cite our paper if you use this code in your own work:
@inproceedings{Fey/etal/2021,
title={{GNNAutoScale}: Scalable and Expressive Graph Neural Networks via Historical Embeddings},
author={Fey, M. and Lenssen, J. E. and Weichert, F. and Leskovec, J.},
booktitle={International Conference on Machine Learning (ICML)},
year={2021},
}

 59 Dec 28, 2022
59 Dec 28, 2022
 655 Jan 04, 2023
655 Jan 04, 2023
 30 Nov 25, 2022
30 Nov 25, 2022
 9k Jan 04, 2023
9k Jan 04, 2023
 143 Dec 29, 2022
143 Dec 29, 2022
 41 Dec 13, 2022
41 Dec 13, 2022
 2 Dec 27, 2021
2 Dec 27, 2021
 185 Dec 21, 2022
185 Dec 21, 2022
 10 Dec 07, 2022
10 Dec 07, 2022
 130 Jan 01, 2023
130 Jan 01, 2023
 126 Dec 21, 2022
126 Dec 21, 2022
 75 Dec 14, 2022
75 Dec 14, 2022
 24 Nov 01, 2022
24 Nov 01, 2022
 0 Apr 12, 2022
0 Apr 12, 2022
 3 Aug 28, 2022
3 Aug 28, 2022
 27 Dec 13, 2022
27 Dec 13, 2022
 41 Dec 17, 2022
41 Dec 17, 2022
 345 Jan 08, 2023
345 Jan 08, 2023
 83 Nov 28, 2022
83 Nov 28, 2022
 141 Nov 21, 2022
141 Nov 21, 2022