Box Convolution Layer for ConvNets

Single-box-conv network (from `examples/mnist.py`) learns patterns on MNIST
What This Is
This is a PyTorch implementation of the box convolution layer as introduced in the 2018 NeurIPS paper:
Burkov, E., & Lempitsky, V. (2018) Deep Neural Networks with Box Convolutions. Advances in Neural Information Processing Systems 31, 6214-6224.
How to Use
Installing
python3 -m pip install git+https://github.com/shrubb/box-convolutions.git
python3 -m box_convolution.test # if throws errors, please open a GitHub issue
To uninstall:
python3 -m pip uninstall box_convolution
Tested on Ubuntu 18.04.2, Python 3.6, PyTorch 1.0.0, GCC {4.9, 5.5, 6.5, 7.3}, CUDA 9.2. Other versions (e.g. macOS or Python 2.7 or CUDA 8 or CUDA 10) should work too, but I haven't checked. If something doesn't build, please open a Github issue.
Known issues (see this chat):
- CUDA 9/9.1 + GCC 6 isn't supported due to a bug in NVCC.
You can specify a different compiler with CC environment variable:
CC=g++-7 python3 -m pip install git+https://github.com/shrubb/box-convolutions.git
Using
import torch
from box_convolution import BoxConv2d
box_conv = BoxConv2d(16, 8, 240, 320)
help(BoxConv2d)
Also, there are usage examples in examples/.
Quick Tour of Box convolutions
You may want to see our poster.
Why reinvent the old convolution?
3×3 convolutions are too small ⮕ receptive field grows too slow ⮕ ConvNets have to be very deep.
This is especially undesirable in dense prediction tasks (segmentation, depth estimation, object detection, ...).
Today people solve this by
- dilated/deformable convolutions (can bring artifacts or degrade to
1×1conv; almost always filter high-frequency); - "global" spatial pooling layers (usually too constrained, fixed size, not "fully convolutional").
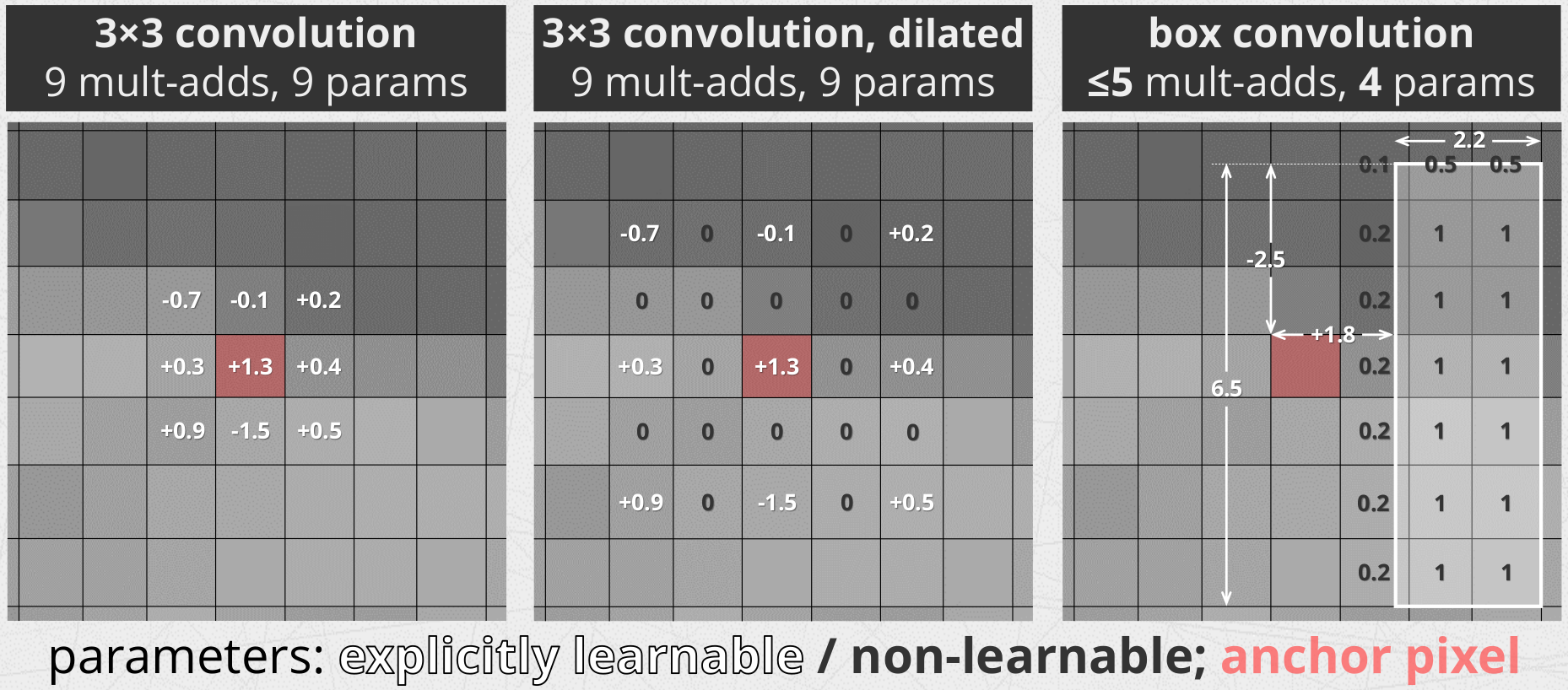
How does it work?
Box convolution layer is a basic depthwise convolution (i.e. Conv2d with groups=in_channels) but with special kernels called box kernels.
A box kernel is a rectangular averaging filter. That is, filter values are fixed and unit! Instead, we learn four parameters per rectangle − its size and offset:

Any success stories?
One example: there is an efficient semantic segmentation model ENet. It's a classical hourglass architecture stacked of dozens ResNet-like blocks (left image).
Let's replace some of these blocks by our "box convolution block" (right image).

First we replaced every second block with a box convolution block (BoxENet in the paper). The model became
- more accurate,
- faster,
- lighter
- without dilated convolutions.
Then, we replaced every residual block (except the down- and up-sampling ones)! The result, BoxOnlyENet, is
- a ConvNet almost without (traditional learnable weight) convolutions,
- 2 times less operations,
- 3 times less parameters,
- still more accurate than ENet!












 16 Dec 14, 2022
16 Dec 14, 2022
 78 Nov 02, 2022
78 Nov 02, 2022
 12 Mar 14, 2022
12 Mar 14, 2022
 33 Dec 26, 2022
33 Dec 26, 2022
 1 Oct 23, 2022
1 Oct 23, 2022
 121 Dec 30, 2022
121 Dec 30, 2022
 10 Dec 26, 2022
10 Dec 26, 2022
 42 Dec 06, 2022
42 Dec 06, 2022
 12 Nov 24, 2022
12 Nov 24, 2022
 23 Oct 19, 2022
23 Oct 19, 2022
 1.3k Dec 28, 2022
1.3k Dec 28, 2022
 1 Nov 24, 2022
1 Nov 24, 2022
 270 Jan 07, 2023
270 Jan 07, 2023
 2 Mar 21, 2022
2 Mar 21, 2022
 32 Dec 13, 2022
32 Dec 13, 2022
 19.4k Jan 04, 2023
19.4k Jan 04, 2023
 187 Dec 28, 2022
187 Dec 28, 2022
 5 Jan 28, 2022
5 Jan 28, 2022
 813 Dec 31, 2022
813 Dec 31, 2022
 46 Dec 19, 2022
46 Dec 19, 2022