| Branch | OSX/Linux | Windows |
|---|---|---|
| master |  |
|
| dev |  |
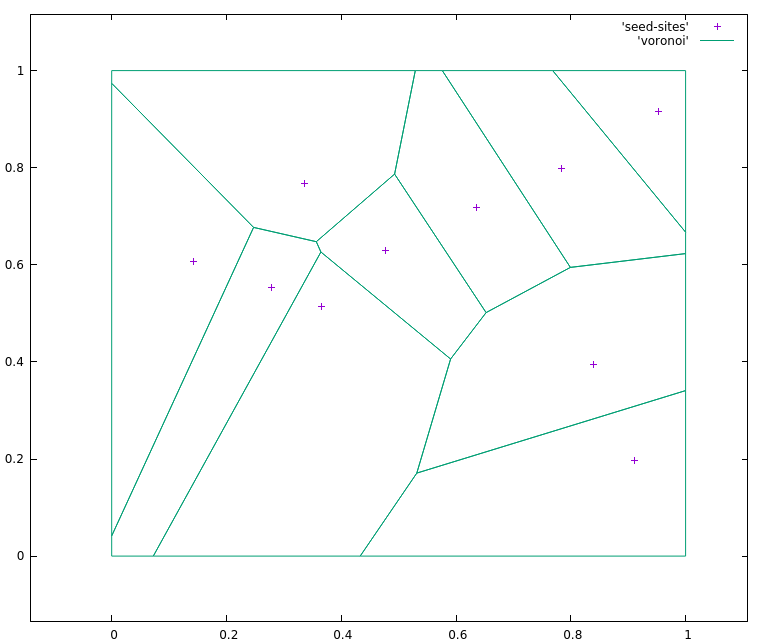
jc_voronoi
A fast C/C++ header only implementation for creating 2D Voronoi diagrams from a point set
Uses Fortune's sweep algorithm.


Brief
I was realizing that the previous 2D voronoi generator I was using, was taking up too much time in my app, and worse, sometimes it also produced errors.
So I started looking for other implementations.
Given the alternatives out there, they usually lack one aspect or the other. So this project set out to achieve a combination of the good things the other libs provide.
- Easy to use
- Robustness
- Speed
- Small memory footprint
- Single/Double floating point implementation
- Readable code
- Small code (single source file)
- No external dependencies
- Cells have a list of edges (for easier/faster relaxation)
- Edges should be clipped
- A clear license
But mostly, I did it for fun :)
Disclaimer
This software is supplied "AS IS" without any warranties and support
License
Feature comparisons
| Feature vs Impl | voronoi++ | boost | fastjet | jcv |
|---|---|---|---|---|
| Language | C++ | C++ | C | C |
| Edge clip | * | * | * | |
| Generate Edges | * | * | * | * |
| Generate Cells | * | * | * | |
| Cell Edges Not Flipped | * | * | ||
| Cell Edges CCW | * | * | ||
| Easy Relaxation | * | |||
| Custom Allocator | * |
Usage
The api contains these functions
void jcv_diagram_generate( int num_points, const jcv_point* points, const jcv_rect* rect, const jcv_clipper* clipper, jcv_diagram* diagram );
void jcv_diagram_generate_useralloc( int num_points, const jcv_point* points, const jcv_rect* rect, const jcv_clipper* clipper, void* userallocctx, FJCVAllocFn allocfn, FJCVFreeFn freefn, jcv_diagram* diagram );
void jcv_diagram_free( jcv_diagram* diagram );
const jcv_site* jcv_diagram_get_sites( const jcv_diagram* diagram );
const jcv_edge* jcv_diagram_get_edges( const jcv_diagram* diagram );
const jcv_edge* jcv_diagram_get_next_edge( const jcv_edge* edge );
The input points are pruned if
* There are duplicates points
* The input points are outside of the bounding box
* The input points are rejected by the clipper's test function
The input bounding box is optional
The input clipper is optional, a default box clipper is used by default
Example
Example implementation (see main.c for actual code)
#define JC_VORONOI_IMPLEMENTATION
#include "jc_voronoi.h"
void draw_edges(const jcv_diagram* diagram);
void draw_cells(const jcv_diagram* diagram);
void generate_and_draw(int numpoints, const jcv_point* points, int imagewidth, int imageheight)
{
jcv_diagram diagram;
memset(&diagram, 0, sizeof(jcv_diagram));
jcv_diagram_generate(count, points, 0, 0, &diagram );
draw_edges(diagram);
draw_cells(diagram);
jcv_diagram_free( &diagram );
}
void draw_edges(const jcv_diagram* diagram)
{
// If all you need are the edges
const jcv_edge* edge = jcv_diagram_get_edges( diagram );
while( edge )
{
draw_line(edge->pos[0], edge->pos[1]);
edge = jcv_diagram_get_next_edge(edge);
}
}
void draw_cells(const jcv_diagram* diagram)
{
// If you want to draw triangles, or relax the diagram,
// you can iterate over the sites and get all edges easily
const jcv_site* sites = jcv_diagram_get_sites( diagram );
for( int i = 0; i < diagram->numsites; ++i )
{
const jcv_site* site = &sites[i];
const jcv_graphedge* e = site->edges;
while( e )
{
draw_triangle( site->p, e->pos[0], e->pos[1]);
e = e->next;
}
}
}
Relaxing the points
Here is an example of how to do the relaxations of the cells.
void relax_points(const jcv_diagram* diagram, jcv_point* points)
{
const jcv_site* sites = jcv_diagram_get_sites(diagram);
for( int i = 0; i < diagram->numsites; ++i )
{
const jcv_site* site = &sites[i];
jcv_point sum = site->p;
int count = 1;
const jcv_graphedge* edge = site->edges;
while( edge )
{
sum.x += edge->pos[0].x;
sum.y += edge->pos[0].y;
++count;
edge = edge->next;
}
points[site->index].x = sum.x / count;
points[site->index].y = sum.y / count;
}
}
Double floating point precision
If you wish to use doubles, you can override these defines:
#define JC_VORONOI_IMPLEMENTATION
#define JCV_REAL_TYPE double
#define JCV_ATAN2 atan2
#define JCV_SQRT sqrt
#define JCV_FLT_MAX DBL_MAX
#define JCV_PI 3.141592653589793115997963468544185161590576171875
//define JCV_EDGE_INTERSECT_THRESHOLD 1.0e-10F
#include "jc_voronoi.h"
Custom clipping
The library also comes with a second header, that contains code for custom clipping of edges against a convex polygon.
The polygon is defined by a set of
Again, see main.c for a practical example
#define JC_VORONOI_CLIP_IMPLEMENTATION
#include "jc_voronoi_clip.h"
jcv_clipping_polygon polygon;
// Triangle
polygon.num_points = 3;
polygon.points = (jcv_point*)malloc(sizeof(jcv_point)*(size_t)polygon.num_points);
polygon.points[0].x = width/2;
polygon.points[1].x = width - width/5;
polygon.points[2].x = width/5;
polygon.points[0].y = height/5;
polygon.points[1].y = height - height/5;
polygon.points[2].y = height - height/5;
jcv_clipper polygonclipper;
polygonclipper.test_fn = jcv_clip_polygon_test_point;
polygonclipper.clip_fn = jcv_clip_polygon_clip_edge;
polygonclipper.fill_fn = jcv_clip_polygon_fill_gaps;
polygonclipper.ctx = &polygon;
jcv_diagram diagram;
memset(&diagram, 0, sizeof(jcv_diagram));
jcv_diagram_generate(count, (const jcv_point*)points, 0, clipper, &diagram);
Some Numbers
Tests run on a Intel(R) Core(TM) i7-7567U CPU @ 3.50GHz MBP with 16 GB 2133 MHz LPDDR3 ram. Each test ran 20 times, and the minimum time is presented below
I removed the voronoi++ from the results, since it was consistently 10x-15x slower than the rest and consumed way more memory _



General thoughts
Fastjet
The Fastjet version is built upon Steven Fortune's original C version, which Shane O'Sullivan improved upon. Given the robustness and speed improvements of the implementation done by Fastjet, that should be the base line to compare other implementations with.
Unfortunately, the code is not very readable, and the license is unclear (GPL?)
Also, if you want access to the actual cells, you have to recreate that yourself using the edges.
Boost
Using boost might be convenient for some, but the sheer amount of code is too great in many cases. I had to install 5 modules of boost to compile (config, core, mpl, preprocessor and polygon). If you install full boost, that's 650mb of source.
It is ~2x as slow as the fastest algorithms, and takes ~2.5x as much memory.
The boost implementation also puts the burden of clipping the final edges on the client.
The code consists of only templated headers, and it increases compile time a lot. For simply generating a 2D voronoi diagram using points as input, it is clearly overkill.
Voronoi++
The performance of it is very slow (~20x slower than fastjet) and And it uses ~2.5x-3x more memory than the fastest algorithms.
Using the same data sets as the other algorithms, it breaks under some conditions.
O'Sullivan
A C++ version of the original C version from Steven Fortune.
Although fast, it's not completely robust and will produce errors.
Gallery
I'd love to see what you're using this software for! If possible, please send me images and some brief explanation of your usage of this library!


 it't not a voronoi map and many polygons intersects.
I'm using this function:
it't not a voronoi map and many polygons intersects.
I'm using this function:














 271 Nov 29, 2022
271 Nov 29, 2022
 1 Feb 11, 2022
1 Feb 11, 2022
 85 Nov 27, 2022
85 Nov 27, 2022
 61 Dec 21, 2022
61 Dec 21, 2022
 65 Oct 04, 2022
65 Oct 04, 2022
 1.1k Dec 29, 2022
1.1k Dec 29, 2022
 6 Dec 17, 2022
6 Dec 17, 2022
 74 Nov 29, 2022
74 Nov 29, 2022
 922 Dec 21, 2022
922 Dec 21, 2022
 54 Dec 04, 2022
54 Dec 04, 2022
 1 Jan 04, 2022
1 Jan 04, 2022
 3 Feb 01, 2022
3 Feb 01, 2022
 149 Dec 15, 2022
149 Dec 15, 2022
 115 Jan 06, 2023
115 Jan 06, 2023
 532 Jan 02, 2023
532 Jan 02, 2023
 4 Mar 17, 2022
4 Mar 17, 2022
 768 Dec 24, 2022
768 Dec 24, 2022
 45 Dec 26, 2022
45 Dec 26, 2022
 8 May 17, 2022
8 May 17, 2022
 21 Nov 20, 2022
21 Nov 20, 2022