topas-create-custom-mlc
A GUI to automatically create a TOPAS-readable MLC simulation file
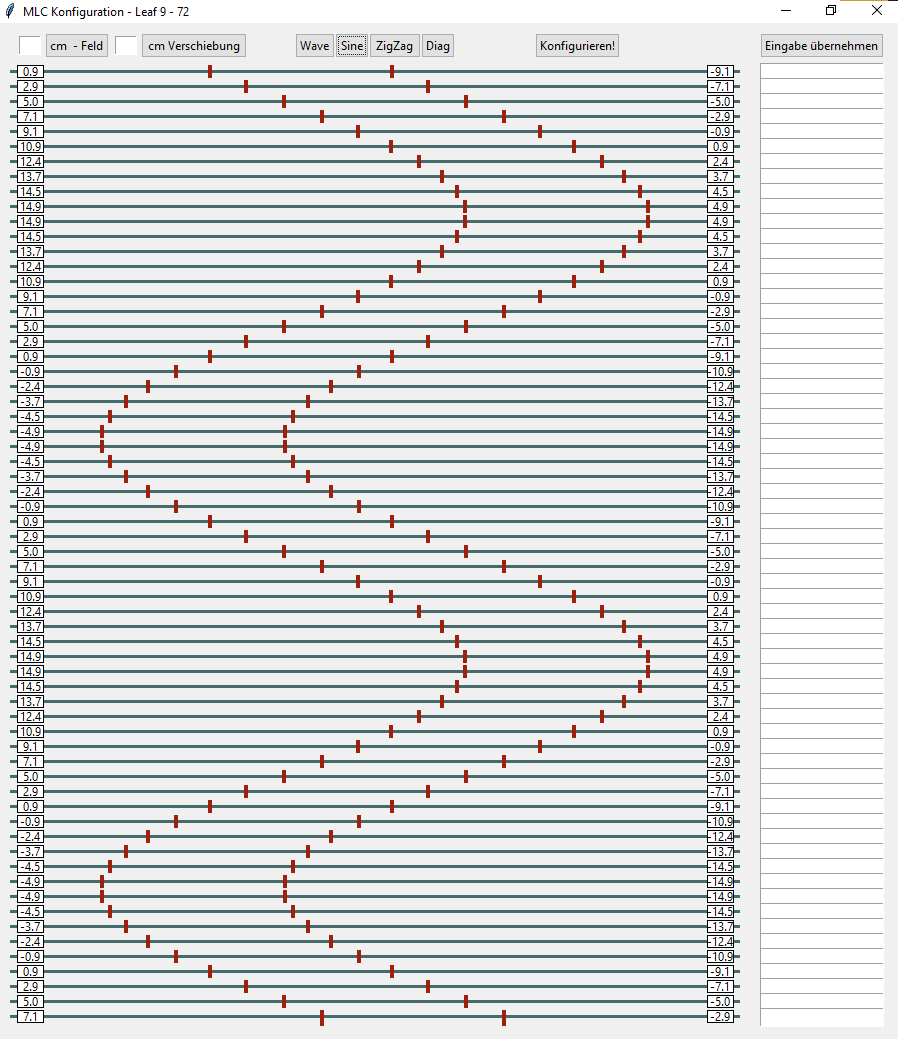
Modern MLCs can have very compley leaf designs. Since not all geometries can be build using TOPAS, this script creates a custom MLC architecture from a CAD file describing a single leaf (.stl). Using a GUI, the positions of up to 64 leaf pairs can be individually customized - simply limited by the screen height. However, an arbitary amount of leaf pairs can be positioned using rectangular fields, or using presets.
Usage
Before starting the script, a couple of options need to be set to match the program to your .stl file.
Change the values in the ###Setup### portion of the script to match your requirements:
- leaf_stl_path : Let TOPAS know where to find the .stl file describing the leaf
- number_of_leaf_pairs : Number of leaf pairs in the MLC
- MLC-TransZ : Distance from the Source to the top of the MLC, in cm
- SSD : Source-Surface-Distance, in cm
- dist_from_xy_plane_to_top_edge : Z-Coordinate of the .stl environment (ideally this would be 0), in mm
- dist_from_z_axis_to_inner_edge : X-/Y-Coordinate of the .stl environment (deviation from centre axis), in mm
Preview
Extended Functionality
This program is capable of reflecting leaf bank rotation. The user can change TransY and RotX in the CreateTopasMLCFile() function (custom_mlc_creator_functions.py) to supply a list describing the rotation of each leaf as well as the vertical position. Also, this program assumes the .stl file is set up in so that the field defining face is already facing the Z-axis. In case it is not, the values in RotX should be changed to 0 instead of 180 (degrees).
Dependencies
Requires python3, numpy, and tkinter.
The tkSliderWidget.py is adapted from https://github.com/MenxLi/tkSliderWidget.
 9 Jul 28, 2022
9 Jul 28, 2022
 50 Sep 26, 2022
50 Sep 26, 2022
 191 Dec 23, 2022
191 Dec 23, 2022

 31 Oct 25, 2022
31 Oct 25, 2022

 110 Dec 30, 2022
110 Dec 30, 2022
 7 Jul 15, 2022
7 Jul 15, 2022

 12 Jan 2, 2023
12 Jan 2, 2023
 14 Dec 31, 2022
14 Dec 31, 2022
 0 May 31, 2022
0 May 31, 2022

 7 Nov 22, 2022
7 Nov 22, 2022
 89 Dec 26, 2022
89 Dec 26, 2022
 61 Dec 21, 2022
61 Dec 21, 2022
 242 Dec 30, 2022
242 Dec 30, 2022
 80 Nov 21, 2022
80 Nov 21, 2022
 14 Sep 13, 2022
14 Sep 13, 2022
 96 Dec 13, 2022
96 Dec 13, 2022
 2 Nov 13, 2021
2 Nov 13, 2021
 16 Oct 22, 2022
16 Oct 22, 2022
 39 Dec 05, 2022
39 Dec 05, 2022
 104 Dec 07, 2022
104 Dec 07, 2022
 2 Dec 26, 2021
2 Dec 26, 2021
 1 Jan 21, 2022
1 Jan 21, 2022
 87 Dec 06, 2022
87 Dec 06, 2022
 144 Jan 04, 2023
144 Jan 04, 2023
 37 Dec 20, 2022
37 Dec 20, 2022
 75 Dec 09, 2022
75 Dec 09, 2022
 163 Dec 22, 2022
163 Dec 22, 2022
 4 Dec 18, 2022
4 Dec 18, 2022
 4 Sep 08, 2022
4 Sep 08, 2022