shufflev2-yolov5:lighter, faster and easier to deploy 

Perform a series of ablation experiments on yolov5 to make it lighter (smaller Flops, lower memory, and fewer parameters) and faster (add shuffle channel, yolov5 head for channel reduce. It can infer at least 10+ FPS On the Raspberry Pi 4B when input the frame with 320×320) and is easier to deploy (removing the Focus layer and four slice operations, reducing the model quantization accuracy to an acceptable range).
Comparison of ablation experiment results
| ID | Model | Input_size | Flops | Params | Size(M) | [email protected] | [email protected]:0.95 |
|---|---|---|---|---|---|---|---|
| 001 | yolo-faster | 320×320 | 0.25G | 0.35M | 1.4 | 24.4 | - |
| 002 | nanodet-m | 320×320 | 0.72G | 0.95M | 1.8 | - | 20.6 |
| 003 | shufflev2-yolov5 | 320×320 | 1.43G | 1.62M | 3.3 | 35.5 | - |
| 004 | nanodet-m | 416×416 | 1.2G | 0.95M | 1.8 | - | 23.5 |
| 005 | shufflev2-yolov5 | 416×416 | 2.42G | 1.62M | 3.3 | 40.5 | 23.5 |
| 006 | yolov4-tiny | 416×416 | 5.62G | 8.86M | 33.7 | 40.2 | 21.7 |
| 007 | yolov3-tiny | 416×416 | 6.96G | 6.06M | 23.0 | 33.1 | 16.6 |
Comparison on different platforms
| Equipment | Computing backend | System | Framework | Input | Speed{our} | Speed{yolov5s} |
|---|---|---|---|---|---|---|
| Inter | @i5-10210U | window(x86) | 640×640 | torch-cpu | 112ms | 179ms |
| Nvidia | @RTX 2080Ti | Linux(x86) | 640×640 | torch-gpu | 11ms | 13ms |
| Raspberrypi 4B | @ARM Cortex-A72 | Linux(arm64) | 320×320 | ncnn | 97ms | 371ms |
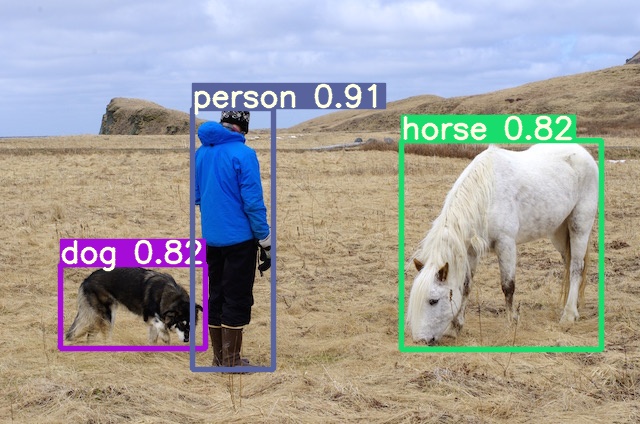
Detection effect
Pytorch{640×640}:

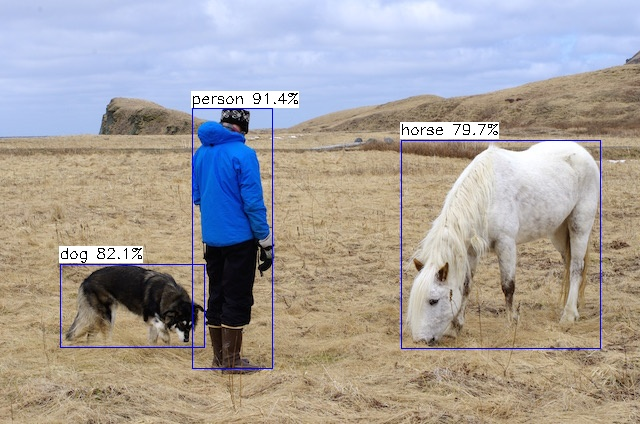
NCNN{FP16}@{640×640}:

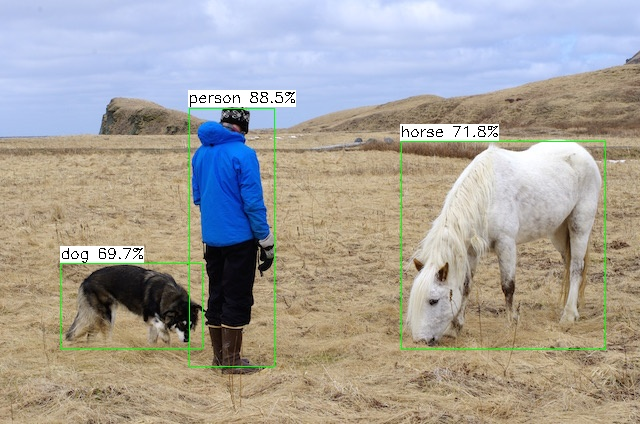
NCNN{Int8}@{640×640}:

Base on YOLOv5
10FPS can be used with yolov5 on the Raspberry Pi with only 0.1T computing power
Excluding the first three warm-ups, the device temperature is stable above 45°, the forward reasoning framework is ncnn, and the two benchmark comparisons are recorded
# 第四次
[email protected]:~/Downloads/ncnn/build/benchmark $ ./benchncnn 8 4 0
loop_count = 8
num_threads = 4
powersave = 0
gpu_device = -1
cooling_down = 1
shufflev2-yolov5 min = 90.86 max = 93.53 avg = 91.56
shufflev2-yolov5-int8 min = 83.15 max = 84.17 avg = 83.65
shufflev2-yolov5-416 min = 154.51 max = 155.59 avg = 155.09
yolov4-tiny min = 298.94 max = 302.47 avg = 300.69
nanodet_m min = 86.19 max = 142.79 avg = 99.61
squeezenet min = 59.89 max = 60.75 avg = 60.41
squeezenet_int8 min = 50.26 max = 51.31 avg = 50.75
mobilenet min = 73.52 max = 74.75 avg = 74.05
mobilenet_int8 min = 40.48 max = 40.73 avg = 40.63
mobilenet_v2 min = 72.87 max = 73.95 avg = 73.31
mobilenet_v3 min = 57.90 max = 58.74 avg = 58.34
shufflenet min = 40.67 max = 41.53 avg = 41.15
shufflenet_v2 min = 30.52 max = 31.29 avg = 30.88
mnasnet min = 62.37 max = 62.76 avg = 62.56
proxylessnasnet min = 62.83 max = 64.70 avg = 63.90
efficientnet_b0 min = 94.83 max = 95.86 avg = 95.35
efficientnetv2_b0 min = 103.83 max = 105.30 avg = 104.74
regnety_400m min = 76.88 max = 78.28 avg = 77.46
blazeface min = 13.99 max = 21.03 avg = 15.37
googlenet min = 144.73 max = 145.86 avg = 145.19
googlenet_int8 min = 123.08 max = 124.83 avg = 123.96
resnet18 min = 181.74 max = 183.07 avg = 182.37
resnet18_int8 min = 103.28 max = 105.02 avg = 104.17
alexnet min = 162.79 max = 164.04 avg = 163.29
vgg16 min = 867.76 max = 911.79 avg = 889.88
vgg16_int8 min = 466.74 max = 469.51 avg = 468.15
resnet50 min = 333.28 max = 338.97 avg = 335.71
resnet50_int8 min = 239.71 max = 243.73 avg = 242.54
squeezenet_ssd min = 179.55 max = 181.33 avg = 180.74
squeezenet_ssd_int8 min = 131.71 max = 133.34 avg = 132.54
mobilenet_ssd min = 151.74 max = 152.67 avg = 152.32
mobilenet_ssd_int8 min = 85.51 max = 86.19 avg = 85.77
mobilenet_yolo min = 327.67 max = 332.85 avg = 330.36
mobilenetv2_yolov3 min = 221.17 max = 224.84 avg = 222.60
# 第八次
[email protected]:~/Downloads/ncnn/build/benchmark $ ./benchncnn 8 4 0
loop_count = 8
num_threads = 4
powersave = 0
gpu_device = -1
cooling_down = 1
nanodet_m min = 84.03 max = 87.68 avg = 86.32
nanodet_m-416 min = 143.89 max = 145.06 avg = 144.67
shufflev2-yolov5 min = 84.30 max = 86.34 avg = 85.79
shufflev2-yolov5-int8 min = 80.98 max = 82.80 avg = 81.25
shufflev2-yolov5-416 min = 142.75 max = 146.10 avg = 144.34
yolov4-tiny min = 276.09 max = 289.83 avg = 285.99
nanodet_m min = 81.15 max = 81.71 avg = 81.33
squeezenet min = 59.37 max = 61.19 avg = 60.35
squeezenet_int8 min = 49.30 max = 49.66 avg = 49.43
mobilenet min = 72.40 max = 74.13 avg = 73.37
mobilenet_int8 min = 39.92 max = 40.23 avg = 40.07
mobilenet_v2 min = 71.57 max = 73.07 avg = 72.29
mobilenet_v3 min = 54.75 max = 56.00 avg = 55.40
shufflenet min = 40.07 max = 41.13 avg = 40.58
shufflenet_v2 min = 29.39 max = 30.25 avg = 29.86
mnasnet min = 59.54 max = 60.18 avg = 59.96
proxylessnasnet min = 61.06 max = 62.63 avg = 61.75
efficientnet_b0 min = 91.86 max = 95.01 avg = 92.84
efficientnetv2_b0 min = 101.03 max = 102.61 avg = 101.71
regnety_400m min = 76.75 max = 78.58 avg = 77.60
blazeface min = 13.18 max = 14.67 avg = 13.79
googlenet min = 136.56 max = 138.05 avg = 137.14
googlenet_int8 min = 118.30 max = 120.17 avg = 119.23
resnet18 min = 164.78 max = 166.80 avg = 165.70
resnet18_int8 min = 98.58 max = 99.23 avg = 98.96
alexnet min = 155.06 max = 156.28 avg = 155.56
vgg16 min = 817.64 max = 832.21 avg = 827.37
vgg16_int8 min = 457.04 max = 465.19 avg = 460.64
resnet50 min = 318.57 max = 323.19 avg = 320.06
resnet50_int8 min = 237.46 max = 238.73 avg = 238.06
squeezenet_ssd min = 171.61 max = 173.21 avg = 172.10
squeezenet_ssd_int8 min = 128.01 max = 129.58 avg = 128.84
mobilenet_ssd min = 145.60 max = 149.44 avg = 147.39
mobilenet_ssd_int8 min = 82.86 max = 83.59 avg = 83.22
mobilenet_yolo min = 311.95 max = 374.33 avg = 330.15
mobilenetv2_yolov3 min = 211.89 max = 286.28 avg = 228.01
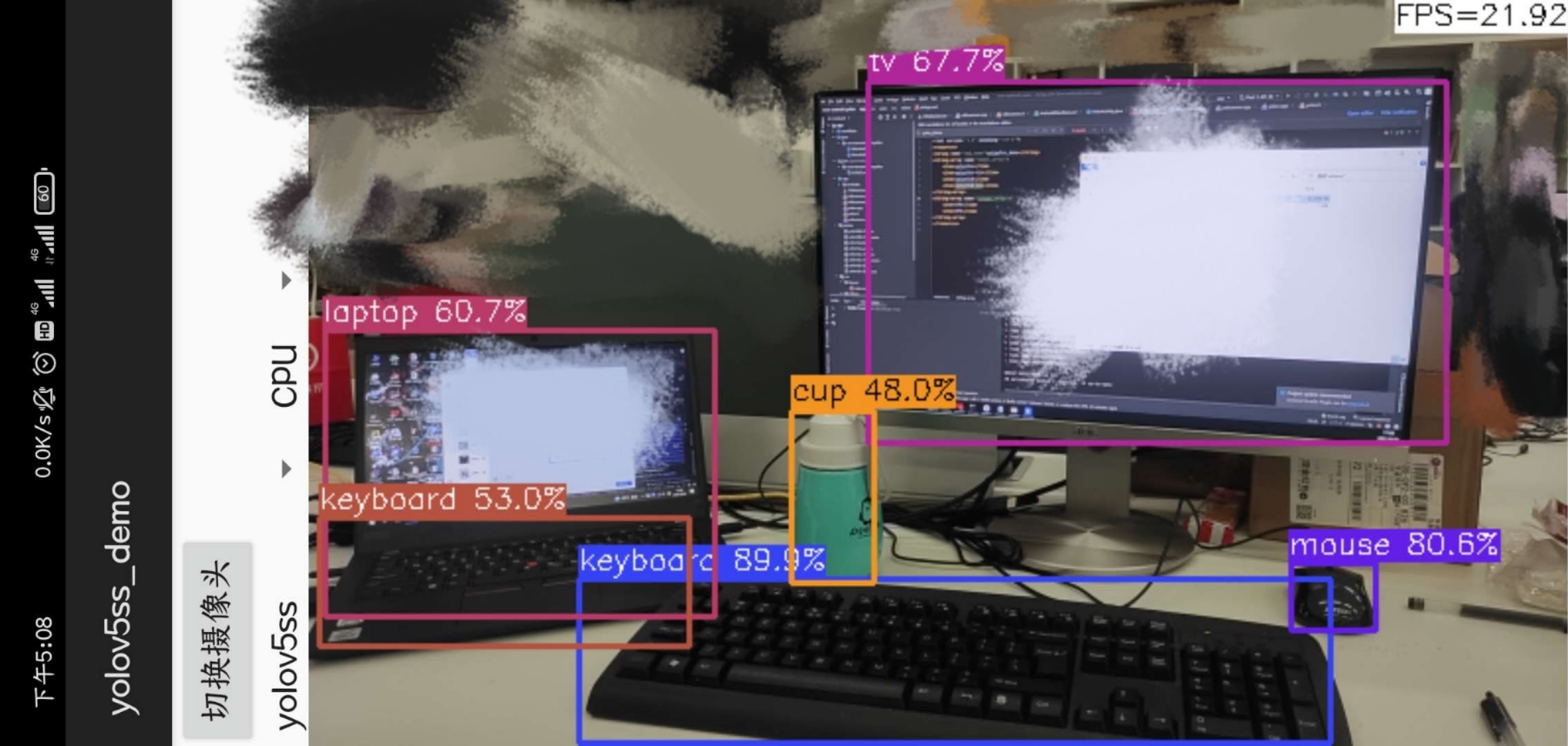
NCNN_Android_demo
This is a Redmi phone, the processor is Snapdragon 730G, and shufflev2-yolov5 is used for detection. The performance is as follows:
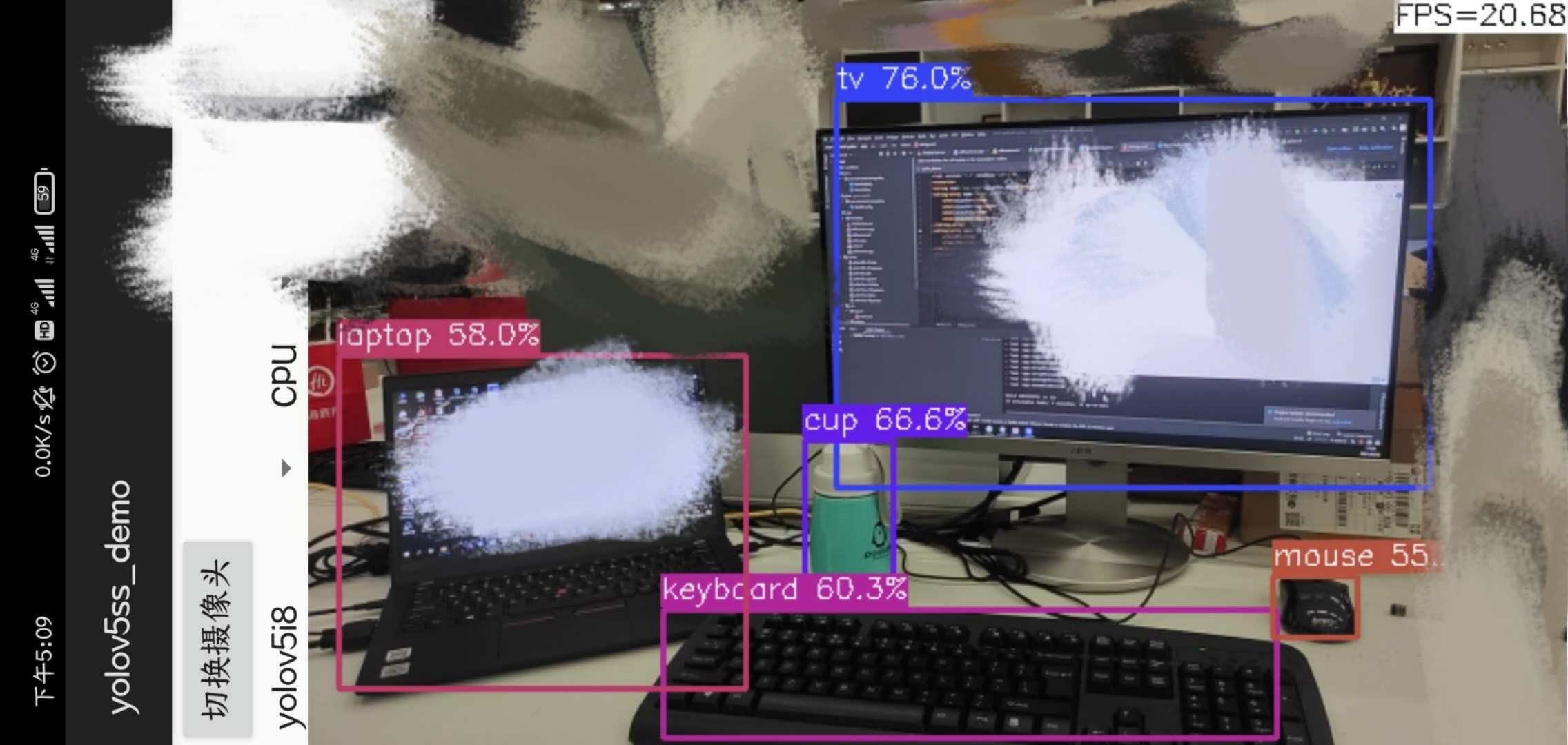
This is the quantized int8 model:
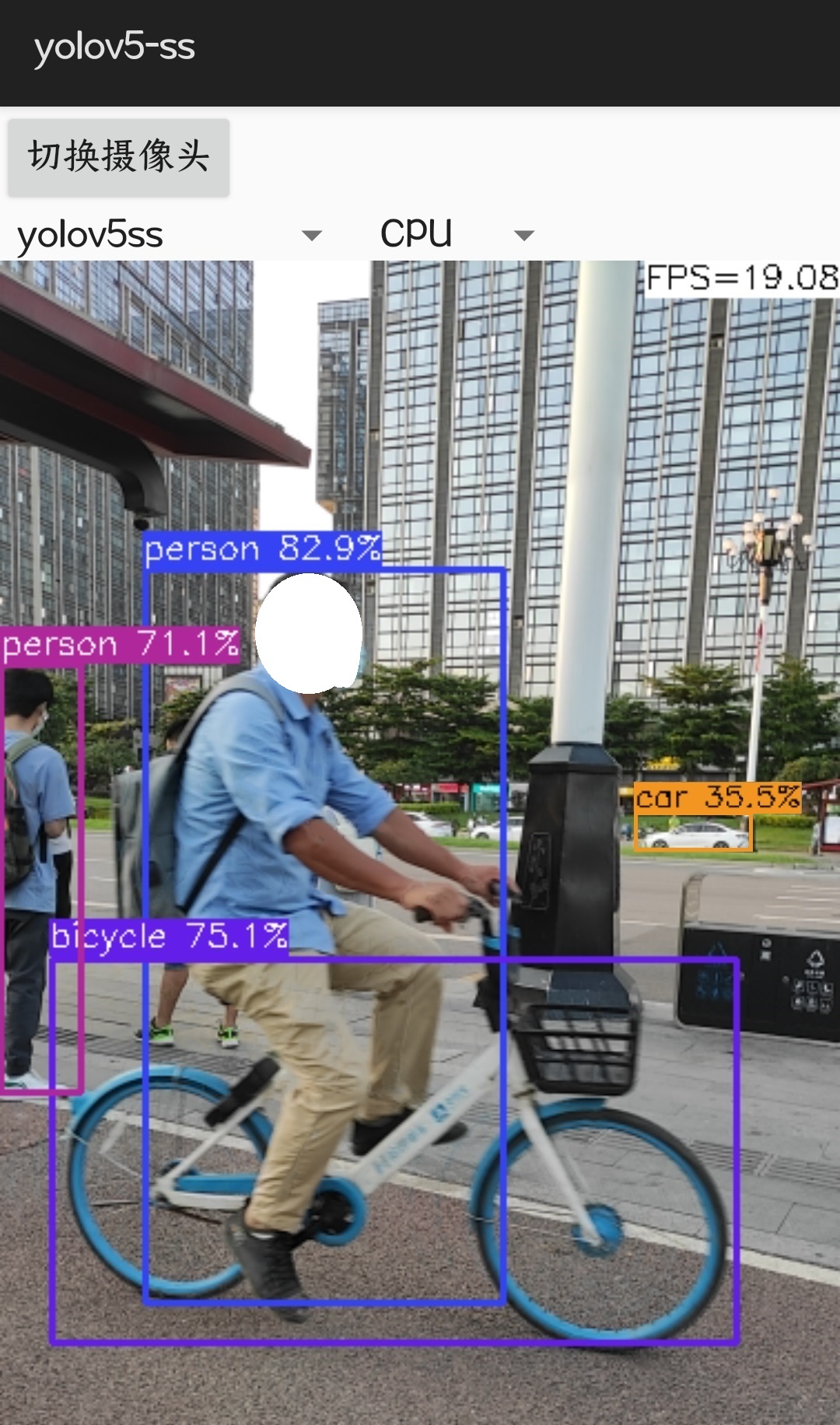
Outdoor scene example:
More detailed explanation
Detailed model link: https://zhuanlan.zhihu.com/p/400545131

NCNN deployment and int8 quantization:https://zhuanlan.zhihu.com/p/400975662

Reference
https://github.com/Tencent/ncnn











 Yolov5-Lite项目基于v5 5.0版本开发,请问,相较u版的代码,该项目是否在lite-g模型测试时添加了其他额外的操作,或者额外的方法呢?
Yolov5-Lite项目基于v5 5.0版本开发,请问,相较u版的代码,该项目是否在lite-g模型测试时添加了其他额外的操作,或者额外的方法呢?







 147 Dec 28, 2022
147 Dec 28, 2022
 52 Nov 09, 2022
52 Nov 09, 2022
 43 Oct 23, 2022
43 Oct 23, 2022
 1 Oct 08, 2022
1 Oct 08, 2022
 292 Dec 06, 2022
292 Dec 06, 2022
 55 Sep 14, 2022
55 Sep 14, 2022
 15 Oct 22, 2022
15 Oct 22, 2022
 213 Dec 27, 2022
213 Dec 27, 2022
 34 Nov 27, 2022
34 Nov 27, 2022
 45 Nov 10, 2022
45 Nov 10, 2022
 3 Feb 18, 2022
3 Feb 18, 2022
 7 Nov 02, 2022
7 Nov 02, 2022
 1 Aug 02, 2022
1 Aug 02, 2022
 226 Nov 05, 2022
226 Nov 05, 2022
 23 Dec 21, 2022
23 Dec 21, 2022
 10 Sep 13, 2022
10 Sep 13, 2022
 8 Sep 06, 2021
8 Sep 06, 2021
 530 Jan 04, 2023
530 Jan 04, 2023
 83 Dec 31, 2022
83 Dec 31, 2022
 7 Oct 26, 2022
7 Oct 26, 2022