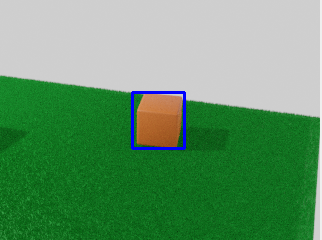
I've created this Blender scene where I have a dice, and I'm using ZPY to generate a dataset composed of images obtained by rotating around the object and jittering both the dice position and the camera. Everything seems to be working properly, but the bounding-boxes generated on the annotation file get progressively worse with each picture.
For example this is the first image's bounding-box:
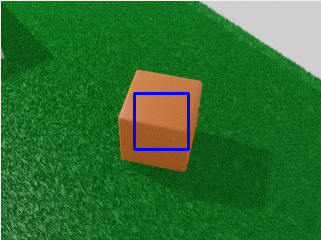
This one we get halfway through:
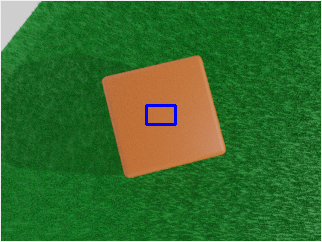
And this is one of the last ones:
This is my code (I've cut some stuff, I can't paste it all for some reason):
def run(num_steps = 20):
# Random seed results in unique behavior
zpy.blender.set_seed()
# Create the saver object
saver = zpy.saver_image.ImageSaver(description="Domain randomized dado")
# Add the dado category
dado_seg_color = zpy.color.random_color(output_style="frgb")
saver.add_category(name="dado", color=dado_seg_color)
# Segment Suzzanne (make sure a material exists for the object!)
zpy.objects.segment("dado", color=dado_seg_color)
# Original dice pose
zpy.objects.save_pose("dado", "dado_pose_og")
#Original camera pose
zpy.objects.save_pose("Camera", "Camera_pose_og")
# Save the positions of objects so we can jitter them later
zpy.objects.save_pose("Camera", "cam_pose")
zpy.objects.save_pose("dado", "dado_pose")
asset_dir = Path(bpy.data.filepath).parent
texture_paths = [
asset_dir / Path("textures/madera.png"),
asset_dir / Path("textures/ladrillo.png"),
]
# Run the sim.
for step_idx in range(num_steps):
# Example logging
# stp = zpy.blender.step()
# print("BLENDER STEPS: ", stp.num_steps)
# log.debug("This is a debug log")
# Return camera and dado to original positions
zpy.objects.restore_pose("Camera", "cam_pose")
zpy.objects.restore_pose("dado", "dado_pose")
# Rotate camera
location = bpy.context.scene.objects["Camera"].location
angle = step_idx*360/num_steps
location = rotate(location, angle, axis=(0, 0, 1))
bpy.data.objects["Camera"].location = location
# Jitter dado pose
zpy.objects.jitter(
"dado",
translate_range=((-300, 300), (-300, 300), (0, 0)),
rotate_range=(
(0, 0),
(0, 0),
(-math.pi, math.pi),
),
)
# Jitter the camera pose
zpy.objects.jitter(
"Camera",
translate_range=(
(-5, 5),
(-5, 5),
(-5, 5),
),
)
# Camera should be looking at dado
zpy.camera.look_at("Camera", bpy.data.objects["dado"].location)
texture_path = random.choice(texture_paths)
# HDRIs are like a pre-made background with lighting
# zpy.hdris.random_hdri()
# Pick a random texture from the 'textures' folder (relative to blendfile)
# Textures are images that we will map onto a material
new_mat = zpy.material.make_mat_from_texture(texture_path)
# zpy.material.set_mat("dado", new_mat)
# Have to segment the new material
zpy.objects.segment("dado", color=dado_seg_color)
# Jitter the dado material
# zpy.material.jitter(bpy.data.objects["dado"].active_material)
# Jitter the HSV for empty and full images
'''
hsv = (
random.uniform(0.49, 0.51), # (hue)
random.uniform(0.95, 1.1), # (saturation)
random.uniform(0.75, 1.2), # (value)
)
'''
# Name for each of the output images
rgb_image_name = zpy.files.make_rgb_image_name(step_idx)
iseg_image_name = zpy.files.make_iseg_image_name(step_idx)
depth_image_name = zpy.files.make_depth_image_name(step_idx)
# Render image
zpy.render.render(
rgb_path=saver.output_dir / rgb_image_name,
iseg_path=saver.output_dir / iseg_image_name,
depth_path=saver.output_dir / depth_image_name,
# hsv=hsv,
)
# Add images to saver
saver.add_image(
name=rgb_image_name,
style="default",
output_path=saver.output_dir / rgb_image_name,
frame=step_idx,
)
saver.add_image(
name=iseg_image_name,
style="segmentation",
output_path=saver.output_dir / iseg_image_name,
frame=step_idx,
)
saver.add_image(
name=depth_image_name,
style="depth",
output_path=saver.output_dir / depth_image_name,
frame=step_idx,
)
# Add annotation to segmentation image
saver.add_annotation(
image=rgb_image_name,
seg_image=iseg_image_name,
seg_color=dado_seg_color,
category="dado",
)
# Write out annotations
saver.output_annotated_images()
saver.output_meta_analysis()
# ZUMO Annotations
zpy.output_zumo.OutputZUMO(saver).output_annotations()
# COCO Annotations
zpy.output_coco.OutputCOCO(saver).output_annotations()
# Volver al estado inicial
zpy.objects.restore_pose("dado", "dado_pose_og")
zpy.objects.restore_pose("Camera", "Camera_pose_og")
Is this my fault or an actual bug?
- OS: Ubuntu 20.04
- Python 3.9
- Blender 2.93
- zpy: latest
bug











![KeyError: 'bpy_struct[key]: key](https://avatars.githubusercontent.com/u/1886347?v=4)



 15k Jan 02, 2023
15k Jan 02, 2023
 436 Dec 27, 2022
436 Dec 27, 2022
 1 Dec 26, 2021
1 Dec 26, 2021
 42 Sep 21, 2022
42 Sep 21, 2022
 248 Dec 14, 2022
248 Dec 14, 2022
 3 May 12, 2022
3 May 12, 2022
 1.1k Dec 16, 2022
1.1k Dec 16, 2022
 79 Dec 30, 2022
79 Dec 30, 2022
 2 Dec 15, 2021
2 Dec 15, 2021
 6.4k Jan 09, 2023
6.4k Jan 09, 2023
 1k Jan 03, 2023
1k Jan 03, 2023
 1 Dec 10, 2021
1 Dec 10, 2021
 135 Dec 18, 2022
135 Dec 18, 2022
 303 Dec 17, 2022
303 Dec 17, 2022
 9 Dec 17, 2022
9 Dec 17, 2022
 47 Jul 26, 2022
47 Jul 26, 2022
 914 Jan 07, 2023
914 Jan 07, 2023
 2.2k Jan 03, 2023
2.2k Jan 03, 2023
 1 Jan 06, 2022
1 Jan 06, 2022