Louise - polynomial-time Program Learning
Getting help with Louise
Louise's author can be reached by email at [email protected]. Please use this email to ask for any help you might need with using Louise.
Louise is brand new and, should you choose to use it, you will most probably encounter errors and bugs. The author has no way to know of what bugs and errors you encounter unless you report them. Please use the author's email to contact the author regarding bugs and errors. Alternatively, you are welcome to open a github Issue or send a pull request.
Table of contents
Overview
Capabilities
Learning logic programs with Louise
Running examples in Swi-Prolog
Learning the "ancestor" relation
Dynamic learning and predicate invention
Examples invention
Experiment scripts
Further documentation
Overview
Louise (Patsantzis & Muggleton 2021) is a machine learning system that learns Prolog programs.
Louise is based on a new program learning algorithm, called Top Program Construction, that runs in polynomial time. Louise can learn recursive programs, including left-recursive and mutually recursive programs and perform multi-predicate learning, predicate invention and examples invention, among other things. Louise includes the program TOIL that can learn metarules for MIL systems, including Louise itself.
Louise is a Meta-Interpretive Learning (MIL) system. MIL (Muggleton et al. 2014), (Muggleton et al. 2015), is a new setting for Inductive Logic Programming (ILP) (Muggleton, 1991). ILP is the branch of machine learning that studies algorithms learning logic programs from examples, background knowledge and a language bias that determines the structure of learned programs. In MIL, the language bias is defined by a set of second-order clause templates called metarules. Examples, background knowledge and metarules must be provided by the user, but Louise can perform predicate invention to extend its background knowledge and metarules and so learn programs that are impossible to learn only from its initial data. Louise can also learn new metarules from examples of a learning target. Finally, Louise can perform examples invention to extend its set of given examples.
In this manual we show simple examples where Louise is trained on small, "toy" problems, designed to demonstrate its use. However, Louise's learning algorithm, Top Program Construction, is efficient enough to learn very large programs. In one of the example datasets included with Louise, a program of more than 2,500 clauses is learned in under 5 minutes.
In general, Louise's novelty means that it has so far primarily been applied to artificial datasets designed to demonstrate its working principles rather than realise its full potential. Work is underway to apply Louise on more challenging problems, including more real-world applications. Keep in mind that Louise is maintained by a single PhD student. New developments should be expected to come at a leisurely pace.
Capabilities
Here are some of the things that Louise can do.
-
Louise can learn recursive programs, including left-recursive programs:
?- learn(ancestor/2). ancestor(A,B):-parent(A,B). ancestor(A,B):-ancestor(A,C),ancestor(C,B). true.
See
data/examples/tiny_kinship.plfor theancestorexample (and other simple, toy examples of learning kinship relations, ideal for first time use).See the section Learning logic programs with Louise for more information on learning logic programs with Louise.
-
Louise can simultaneously learn multiple dependent programs, including mutuallly recursive programs. This is called multi-predicate learning:
?- learn([even/1,odd/1]). even(0). even(A):-predecessor(A,B),odd(B). odd(A):-predecessor(A,B),even(B). true.
See
data/examples/multi_pred.plfor theodd/1andeven/1multi-predicate learning example. -
Louise can discover relevant background knowledge. In the
odd/1andeven/1example above, each predicate is only explicitly givenpredecessor/2as a background predicate. The following are the background knowledge declarations foreven/1andodd/1indata/examples/multi_pred.pl:background_knowledge(even/1, [predecessor/2]). background_knowledge(odd/1, [predecessor/2]).
Louise figures out that
odd/1is necessary to learneven/1and vice-versa on its own. -
Louise can perform predicate invention to incrase its background knowledge with new predicates that are necessary for learning. In the following example the predicate
'$'1/2is an invented predicate:?- learn_dynamic('S'/2). '$1'(A,B):-'S'(A,C),'B'(C,B). 'S'(A,B):-'A'(A,C),'$1'(C,B). 'S'(A,B):-'A'(A,C),'B'(C,B). true.With predicate invention Louise can shift its inductive bias to learn programs that are not possible to learn from its initial set of background knowledge and metarules.
See
data/examples/anbn.plfor the'S'/2example.See the section Dynamic learning and predicate invention for more information on predicate invention in Louise.
-
Louise can unfold programs to eliminate invented predicates. This is a version of the program in the previous example with the invented predicate
'$1'/2eliminated by unfolding:?- learn_dynamic('S'/2). 'S'(A,B):-'A'(A,C),'B'(C,B). 'S'(A,B):-'A'(A,C),'S'(C,D),'B'(D,B). true.Eliminating invented predicates can sometimes improve comprehensibility of the learned program.
-
Louise can fold over-specialised programs to introduce recursion. In the following example, an over-specialised program is learned that finds the last element of a list of length up to 3:
?- learn(list_last/2). list_last(A,B):-tail(A,C),empty(C),head(A,B). list_last(A,B):-tail(A,C),tail(C,D),empty(D),head(C,B). list_last(A,B):-tail(A,C),tail(C,D),tail(D,E),empty(E),head(D,B). true.
We can observe that some clauses in the program above include sequences of body literals that match the body literals in other clauses. The predicate
fold_recursive/2can be used to replace body literals in a clause with an equivalent recursive call:?- learn(list_last/2, _Ps), fold_recursive(_Ps, _Fs), maplist(print_clauses,['%Learned:','\n%Folded:'], [_Ps,_Fs]). %Learned: list_last(A,B):-tail(A,C),empty(C),head(A,B). list_last(A,B):-tail(A,C),tail(C,D),empty(D),head(C,B). list_last(A,B):-tail(A,C),tail(C,D),tail(D,E),empty(E),head(D,B). %Folded: list_last(A,B):-tail(A,C),empty(C),head(A,B). list_last(A,B):-tail(A,C),list_last(C,B). true.
Note the new clause
list_last(A,B):-tail(A,C),list_last(C,B).replacing the second and third clause in the original program. The new, recursive hypothesis is now a correct solution for lists of arbitrary length.The
list_lastexample above was taken from Inductive Logic Programming at 30 (Cropper et al., Machine Learning 2021, to appear). Seedata/examples/recursive_folding.plfor the complete example source code. -
Louise can invent new examples. In the following query a number of examples of
path/2are invented. The background knowledge for this MIL problem consists of 6edge/2ground facts that determine the structure of a graph and a few facts ofnot_edge/2that represent nodes not connected by edges.path(a,f)is the single given example. The target theory for this problem is a recursive definition ofpath/2that includes a "base case" for which no example is given. Louise can invent examples of the base-case and so learn a correct hypothesis that represents the full path from node 'a' to node 'f', without crossing any non-edges.?- learn(path/2). path(a,f). true. ?- examples_invention(path/2,_Es), print_clauses(_Es). m(path,a,b). m(path,a,c). m(path,a,d). m(path,a,e). m(path,a,f). m(path,b,c). m(path,b,d). m(path,b,e). m(path,b,f). m(path,c,d). m(path,c,e). m(path,c,f). m(path,d,e). m(path,d,f). m(path,e,f). true. ?- learn_with_examples_invention(path/2). path(A,B):-edge(A,B). path(A,B):-edge(A,C),path(C,B). true.
See
data/examples/example_invention.plfor thepath/2example.See the section Examples invention for more information on examples invention in Louise.
-
Louise can learn new metarules from examples of a target predicate. In the following example, Louise learns a new metarule from examples of the predicate
'S'/2(as in item 4, above):?- learn_metarules('S'/2). (Meta-dyadic-1) ∃.P,Q,R ∀.x,y,z: P(x,y)← Q(x,z),R(z,y) true.The new metarule, Meta-dyadic-1 corresponds to the common Chain metarule that is used in item 4 to learn a grammar of the a^nb^n language.
Louise can learn new metarules by specialising the most-general metarule in each language class. In the example above, the language class is H(2,2), the language of metarules having exactly three literals of arity 2. The most general metarule in H(2,2) is Meta-dyadic:
?- print_quantified_metarules(meta_dyadic). (Meta-dyadic) ∃.P,Q,R ∀.x,y,z,u,v,w: P(x,y)← Q(z,u),R(v,w) true.
Louise can also learn new metarules given only an upper and lower bound on their numbers of literals. In the example of learning Chain above, instead of specifying Meta-dyadic, we can instead give an upper and lower bound of 3, with a declaration of
higher_order(3,3). -
Louise comes with a number of libraries for tasks that are useful when learning programs with MIL, e.g. metarule generation, program reduction, lifting of ground predicates, etc. These will be discussed in detail in the upcoming Louise manual.
Learning logic programs with Louise
In this section we give a few examples of learning simple logic programs with Louise. The examples are chosen to demonstrate Louise's usage, not to convince of Louise's strengths as a learner. All the examples in this section are in the directory louise/data/examples. After going through the examples here, feel free to load and run the examples in that directory to better familiarise yourself with Louise's functionality.
Running examples in Swi-Prolog
Swi-Prolog is a popular, free and open-source Prolog interpreter and development environment. Louise was written for Swi-Prolog. To run the examples in this section you will need to install Swi-Prolog. You can download Swi-Prolog from the following URL:
https://www.swi-prolog.org/Download.html
Louise runs with any of the latest stable or development releases listed on that page. Choose the one you prefer to download.
It is recommended that you run the examples using the Swi-Prolog graphical IDE, rather than in a system console. On operating systems with a graphical environment the Swi-Prolog IDE should start automaticaly when you open a Prolog file.
In this section, we assume you have cloned this project into a directory called louise. Paths to various files will be given relative to the louise project root directory and queries at the Swi-Prolog top-level will assume your current working directory is louise.
Learning the "ancestor" relation
Louise learns Prolog programs from examples, background knowledge and second order clause templates called metarules. Together, examples, background knowledge and metarules form the elements of a MIL problem.
Louise expects the elements of a MIL problem to be in an experiment file with a standard format. The following is an example showing how to use Louise to learn the "ancestor" relation from the examples, background knowledge and metarules defined in the experiment file louise/data/examples/tiny_kinship.pl using the learning predicate learn/1.
In summary, there are four steps to running the example: a) start Louise; b) edit the configuration file to select tiny_kinship.pl as the experiment file; c) load the experiment file into memory; d) run a learning query. These four steps are described in detail below.
-
Consult the project's load file into Swi-Prolog to load necessary files into memory:
In a graphical environment:
?- [load_project].
In a text-based environment:
?- [load_headless].
The first query will also start the Swi-Prolog IDE and documentation browser, which you probably don't want if you're in a text-based environment.
-
Edit the project's configuration file to select an experiment file.
Edit
louise/configuration.plin the Swi-Prolog editor (or your favourite text editor) and make sure the name of the current experiment file is set totiny_kinship.pl:experiment_file('data/examples/tiny_kinship.pl',tiny_kinship).
The above line will already be in the configuration file when you first clone Louise from its github repository. There will be a few more clauses of
experiment_file/2, each on a seprate line and commented-out. These are there to quickly change between different experiment files without having to re-write their paths every time. Make sure that only a singleexperiment_file/2clause is loaded in memory (i.e. don't uncomment any otherexperiment_file/2clause except for the one above). -
Reload the configuration file to pick up the new experiment file option.
The easiest way to reload the configuration file is to use Swi-Prolog's
make/0predicate to recompile the project (don't worry- this takes less than a second). To recompile the project withmake/0enter the following query in the Swi-Prolog console:?- make.
Note again: this is the Swi-Prolog predicate
make/0. It's not the make build automation tool! -
Perform a learning attempt using the examples, background knowledge and metarules defined in
tiny_kinship.plforancestor/2.Execute the following query in the Swi-Prolog console; you should see the listed output:
?- learn(ancestor/2). ancestor(A,B):-parent(A,B). ancestor(A,B):-ancestor(A,C),ancestor(C,B). true.
The learning predicate
learn/1takes as argument the predicate symbol and arity of a learning target defined in the currently loaded experiment file.ancestor/2is one of the learning targets defined intiny_kinship.pl, the experiment file selected in step 2. The same experiment file defines a number of other learning targets from a typical kinship relations domain.
Dynamic learning and predicate invention
The predicate learn/1 implements Louise's default learning setting that learns a program one-clause-at-a-time without memory of what was learned before. This is limited in that clauses learned in an earlier step cannot be re-used and so it's not possible to learn programs with mutliple clauses "calling" each other, or single recursive clauses that can only be self-resolved.
Louise overcomes this limitation with Dynamic learning, a learning setting where programs are learned incrementally: the program learned in each dynamic learning episode is added to the background knowledge for the next episode. Dynamic learning also permits predicate invention, by inventing, and then re-using, definitions of new predicates that are necessary for learning but are not in the background knowledge defined by the user.
The example of learning the a^nb^n language in section Capabilities is an example of learning with dynamic learning. The result is a grammar in Prolog's Definite Clause Grammars formalism DCG. Below, we list the steps to run this example yourself. The steps to run this example are similar to the steps to run the ancestor/2 example, only this time the learning predicate is learn_dynamic/1:
-
Start the project:
In a graphical environment:
?- [load_project].
In a text-based environment:
?- [load_headless].
-
Edit the project's configuration file to select the
anbn.plexperiment file.experiment_file('data/examples/anbn.pl',anbn).
-
Reload the configuration file to pick up the new experiment file option.
?- make.
-
Perform an initial learning attempt without Dynamic learning:
?- learn('S'/2). 'S'([a,a,a,b,b,b],[]). 'S'([a,a,b,b],[]). 'S'(A,B):-'A'(A,C),'B'(C,B). true.The elements for the learning problem defined in the
anbn.plexperiment file only include three example strings in thea^nb^nlanguage, the pre-terminals in the language,'A' --> [a].and'B' --> [b].(where'A','B'are nonterminal symbols and[a],[b]are terminals) and the Chain metarule. Given this problem definition, Louise can only learn a single new clause of 'S/2' (the starting symbol in the grammar), that only covers its first example, the string 'ab'. -
Perform a second learning attemt with dynamic lerning:
?- learn_dynamic('S'/2). '$1'(A,B):-'S'(A,C),'B'(C,B). 'S'(A,B):-'A'(A,C),'$1'(C,B). 'S'(A,B):-'A'(A,C),'B'(C,B). true.With dynamic learning, Louise can re-use the first clause it learns (the one covering 'ab', listed above) to invented a new nonterminal,
$1/2, that it can then use to construct the full grammar.
Examples invention
Louise can perform examples invention which is just what it sounds like. Examples invention works best when you have relevant background knowledge and metarules but insufficient positive examples to learn a correct hypothesis. It works even better when you have at least some negative examples. If your background knowledge is irrelevant or you don't have "enough" negative examples (where "enough" depends on the MIL problem) then examples invention can over-generalise and produce spurious results.
The learning predicate for examples invention in Louise is learn_with_examples_invention/2. Below is an example showing how to use it, again following the structure of the examples shown previously.
-
Start the project:
In a graphical environment:
?- [load_project].
In a text-based environment:
?- [load_headless].
-
Edit the project's configuration file to select the
examples_invention.plexperiment file.experiment_file('data/examples/examples_invention.pl',path).
-
Reload the configuration file to pick up the new experiment file option.
?- make.
-
Try a first learning attempt without examples invention:
?- learn(path/2). path(a,f). true.
The single positive example in
examples_invention.plare insufficient for Louise to learn a general theory ofpath/2. Louise simply returns the single positive example, un-generalised. -
Perform a second learning attempt with examples invention:
?- learn_with_examples_invention(path/2). path(A,B):-edge(A,B). path(A,B):-edge(A,C),path(C,B). true.
This time, Louise first tries to invent new examples of
path/2by training in a semi-supervised manner, and then uses these new examples to learn a complete theory ofpath/2.
You can see the examples invented by Louise with examples invention by calling the predicate examples_invention/2:
?- examples_invention(path/2,_Ps), print_clauses(_Ps).
m(path,a,b).
m(path,a,c).
m(path,a,f).
m(path,b,c).
m(path,b,d).
m(path,c,d).
m(path,c,e).
m(path,d,e).
m(path,d,f).
m(path,e,f).
true.
Experiment scripts
Louise stores experiment scripts in the directory data/scripts. An experiment script is the code for an experiment that you want to repeat perhaps with different configuration options and parameters. Louise comes with a "learning curve" script that runs an experiment varying the number of examples (or sampling rate) while measuring accuracy. The script generates a file with some R data that can then be rendered into a learning curve plot by sourcing a plotting script, also included in the scripts directory, with R.
The following are the steps to run a learning curve experiment with the data from the mtg_fragment.pl example experiment file and produce a plot of the results:
-
Start the project:
In a graphical environment:
?- [load_project].
In a text-based environment:
?- [load_headless].
-
Edit the project's configuration file to select the
mtg_fragment.plexperiment file.experiment_file('data/examples/mtg_fragment.pl',mtg_fragment).
-
Edit the learning curve script's configuration file to select necessary options and output directories:
copy_plotting_scripts(scripts(learning_curve/plotting)). logging_directory('output/learning_curve/'). plotting_directory('output/learning_curve/'). r_data_file('learning_curve_data.r'). learning_curve_time_limit(300).
The option
copy_plotting_scripts/1tells the experiment script whether to copy the R plotting script from thescripts/learning_curve/plottingdirectory, to an output directory, listed in the option's single argument. Setting this option tofalsemeans no plotting script is copied. You can specify a different directory for plotting scripts to be copied from if you want to write your own plotting scripts.The options
logging_directory/1andplotting_directory/1determine the destination directory for output logs, R data files and plotting scripts. They can be separate directories if you want. Above, they are the same which is the most convenient.The option
r_data_file/1determines the name of the R data file generated by the experiment script. Data files are clobbered each time the experiment re-runs (it's a bit of a hassle to point the plotting script to them otherwise) so you may want to output an experiment's R data script with a different name to preserve it. You'd have to manually rename the R data file so it can be used by the plotting script in that case.The option
learning_curve_time_limit/1sets a time limit for each learning attempt in a learning curve experiment. If a hypothesis is not learned successfully until this limit has expired, the accurracy (or error etc) of the empty hypothesis is measured instead. -
Reload all configuration files to pick up the new options.
?- make.
Note that loading the main configuration file will turn off logging to the console. The next step directs you to turn it back on again so you can watch the experiment's progress.
-
Enter the following queries to ensure logging to console is turned on.
The console output will log the steps of the experiment so that you can keep track of the experiment's progress (and know that it's running):
?- debug(progress). true. ?- debug(learning_curve). true.
Logging for the learning curve experiment script will have been turned off if you reloaded the main configuration file (because it includes the directive
nodebug(_)). The two queries above turn it back on. -
Enter the following query to run the experiment script:
_T = ability/2, _M = acc, _K = 100, float_interval(1,9,1,_Ss), learning_curve(_T,_M,_K,_Ss,_Ms,_SDs), writeln(_Ms), writeln(_SDs).
_M = acctells the experiment code to measure accuracy. You can also measure error, the reate of false positives, precision or recall, etc._K = 100runs the experiment for 100 steps.float_interval(1,9,1,_Ss)generates a list of floating-point values used as sampling rates in each step of the experiment:[0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9].The experiment code averages the accuracy of hypotheses learned with each sampling rate for all steps and also calculates the standard deviations. The query above will write the means (argument
_Msoflearning_curve/6) and standard deviations (_SDs) in the console so you can have a quick look at the results. The same results are saved in a timestamped log file saved in the logging directory chosen inloggign_directory/1. Log files are not clobbered (unlike R data files, that are) and they include a copy of the R data saved to the R data file. That way you always have a record of each experiment completed and you can reconstruct the plots if needed (by copying the R data from a log file to an R data script and sourcing the plotting script). -
Source the plotting script in the console R to generate an image:
source("<path_to_louise>\\louise\\output\\learning_curve\\plot_learning_curve_results.r")You can save the plot from the R console: select the image and go to File > Savea As > Png... (or other file format). Then choose a location to save the file.
The figure below is the result of sourcing the R plotting script for the learning curve experiment with the
mtg_fragment.pldata.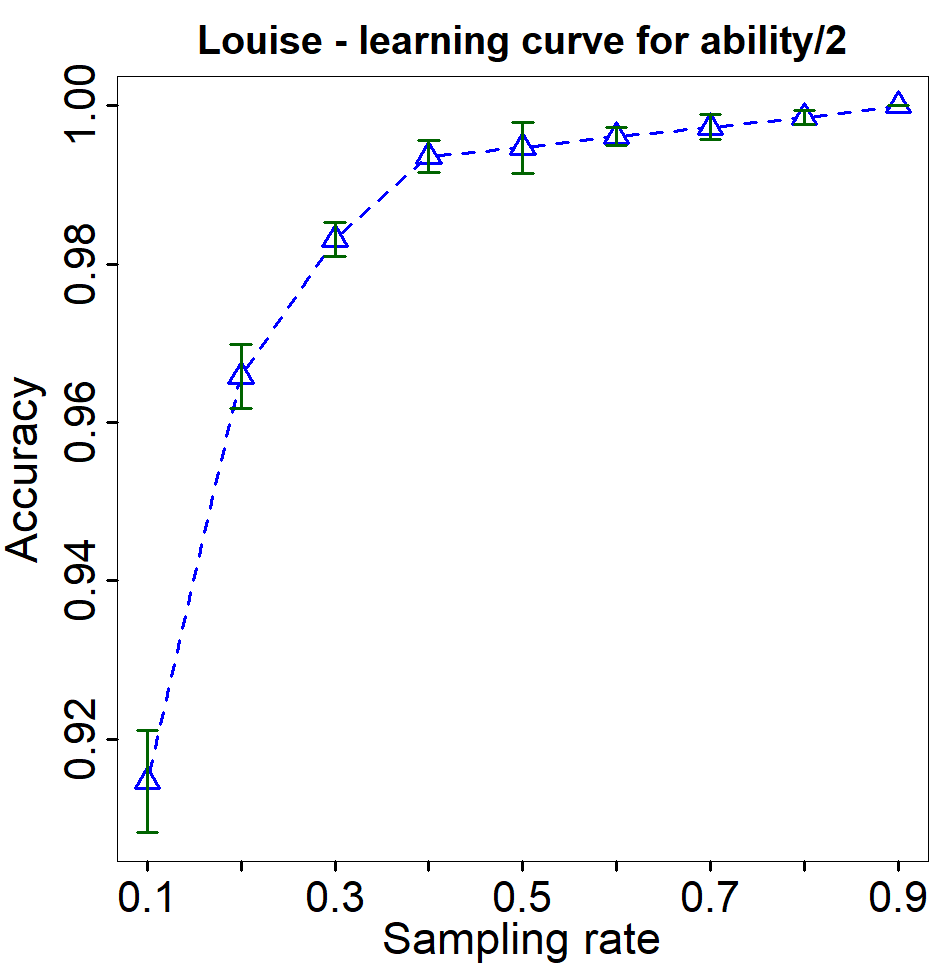
Further documentation
More information about Louise, how it works and how to use it is coming up in the project's manual. For the time being, you can peruse the structured comments in the project's source files. It's also possible to generate a .pdf file from structured documentation, as follows:
-
Load the project as usual.
-
Load the
doc/latex/maket_tex.plmodule:?- use_module(doc/latex/make_tex). true.
-
Run the following query to generate latex files from structure documentation in the project's source code:
?- make_tex. true.
-
Pass the main latex documentation file to pdflatex. By default the main documentation file is
louise/doc/latex/documentation.texcd /doc/latex/ pdflatex -synctex=1 -interaction=nonstopmode .\documentation.tex pdflatex -synctex=1 -interaction=nonstopmode .\documentation.texRun the pdflatex command twice to generate a ToC and bookmarks. You will probably see lots of errors but you will still get a .pdf file. Probably (this hasn't been tested extensively).
Note that the structured documentation included in the Prolog source is a work in progress. Most of the time it is mostly accurate, but there are parts of it that are obsolete. Still- better than nothing.
Additionally to all this you may get some useful information from the current draft of the manual stored in the file MAN.md in the directory louise/doc. Keep in mind that MAN.md is a draft and as such may contain incomplete or inaccurate information. On the other hand, it will probably give a general idea of how to use Louise and what it can do.
Citing Louise
If you wish to use Louise, please cite our work with the reference below:
@article{Patsantzis2021,
author = {Patsantzis, Stassa and Muggleton, Stephen},
title = {Top Program Construction for Polynomial Meta-Interpretive Learning},
journal = {Machine Learning},
year = {2021},
doi = {https://doi.org/10.1007/s10994-020-05945-w}
}
Bibliography
-
S.H. Muggleton, D. Lin, N. Pahlavi, and A. Tamaddoni-Nezhad. Meta-interpretive learning: application to grammatical inference. Machine Learning, 94:25-49, 2014
-
S.H. Muggleton, D. Lin, and A. Tamaddoni-Nezhad. Meta-interpretive learning of higher-order dyadic datalog: Predicate invention revisited. Machine Learning, 100(1):49-73, 2015
-
S.H. Muggleton. Inductive Logic Programming. New Generation Computing, 8(4):295-318, 1991
-
S. Patsantzis and S. H. Muggleton. Top Program Construction for Polynomial-Time Meta-interpretive Learning. Machine Learning, 2021

 0 Jan 25, 2022
0 Jan 25, 2022
 61 Dec 27, 2022
61 Dec 27, 2022
 28 Jul 29, 2022
28 Jul 29, 2022
 10 Feb 01, 2022
10 Feb 01, 2022
 53 Dec 14, 2022
53 Dec 14, 2022
 16 Nov 04, 2022
16 Nov 04, 2022
 84 Oct 15, 2022
84 Oct 15, 2022
 7 Jul 15, 2022
7 Jul 15, 2022
 1 Nov 15, 2021
1 Nov 15, 2021
 1.6k Jan 03, 2023
1.6k Jan 03, 2023
 8 Jan 02, 2023
8 Jan 02, 2023
 1.2k Jan 03, 2023
1.2k Jan 03, 2023
 16 Sep 02, 2022
16 Sep 02, 2022
 1 Nov 30, 2021
1 Nov 30, 2021
 492 Dec 02, 2022
492 Dec 02, 2022
 29 Dec 04, 2022
29 Dec 04, 2022
 48 Nov 15, 2022
48 Nov 15, 2022
 7 Aug 07, 2022
7 Aug 07, 2022
 2 Nov 13, 2021
2 Nov 13, 2021
 126 Dec 20, 2022
126 Dec 20, 2022