kNN_From_Scratch
I implemented the k nearest neighbors (kNN) classification algorithm on python. This algorithm is used to predict the classes of new data points using the known data points. We get the coordinates of the new data points and calculate the distances between the new data points and all of the known ones. As the next step, we sort the distances and get ‘k’ number of the closest points. If we were using uniform weights, we would simply count the number of points for each class and the class with the highest number would be our prediction for the new point. However, in this project I used inverse-distance weights, instead of simply counting the points we give weights for each point. These weights are inversely correlated with the distances, so a closer point gets assigned a higher weight.
Additionally, the program compares my kNN algorithm with scikit-learn's algorithm. When the decision boundaries are plotted, we can't see any observable difference between them. You can un-comment the line 164 to test the program with scikit's algorithm.
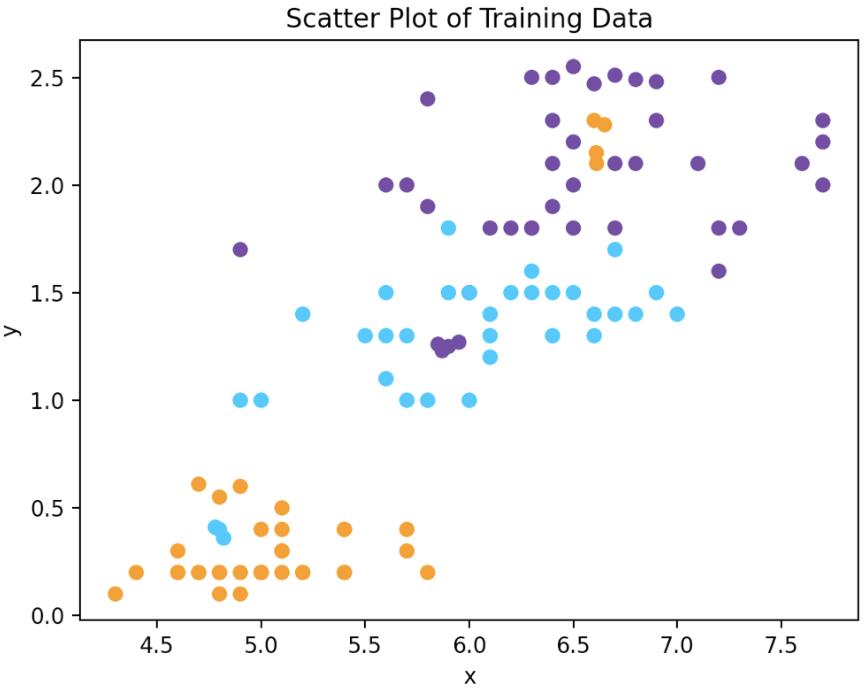
Training Data
Infinite Weights Problem
This algorithm created a problem when the test data and the training data had a point with the same coordinates, because the distance between them would be zero. This would give the point an infinite weight and the other points wouldn’t matter at all. To solve this, I increased the distance to 0.01 whenever the actual distance was zero or lower than 0.01. I decided to use this number because of the dataset that was used. If I have chosen a larger number, there would be lots of points with the same edited distance. If I have chosen a smaller number, points with the same coordinates would get way too heavy weights making it almost the same as the infinite weights problem and this could cause overfitting since an out-of-place point in the training data would influence a significant area in the decision boundary.
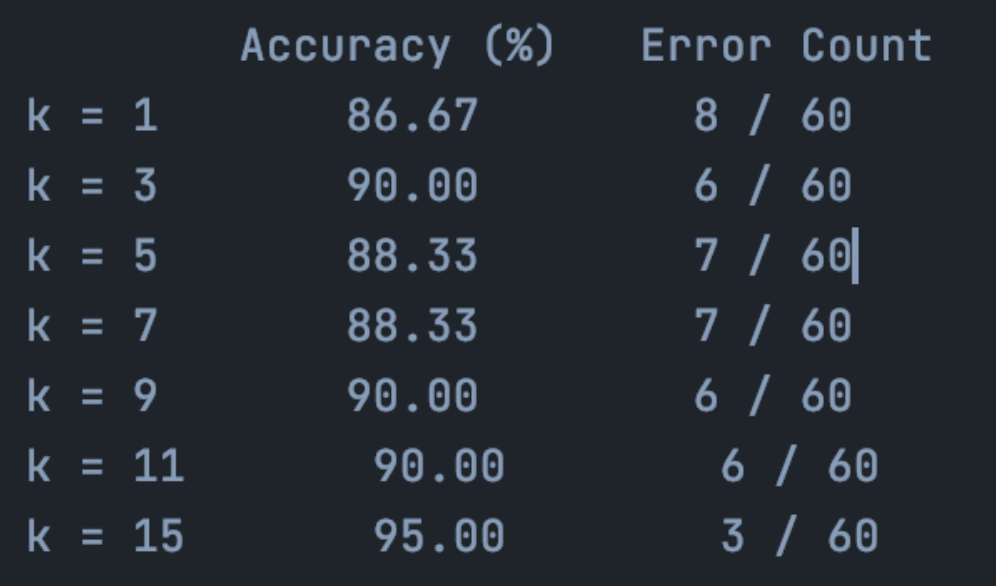
Classification Results
Decision Boundaries
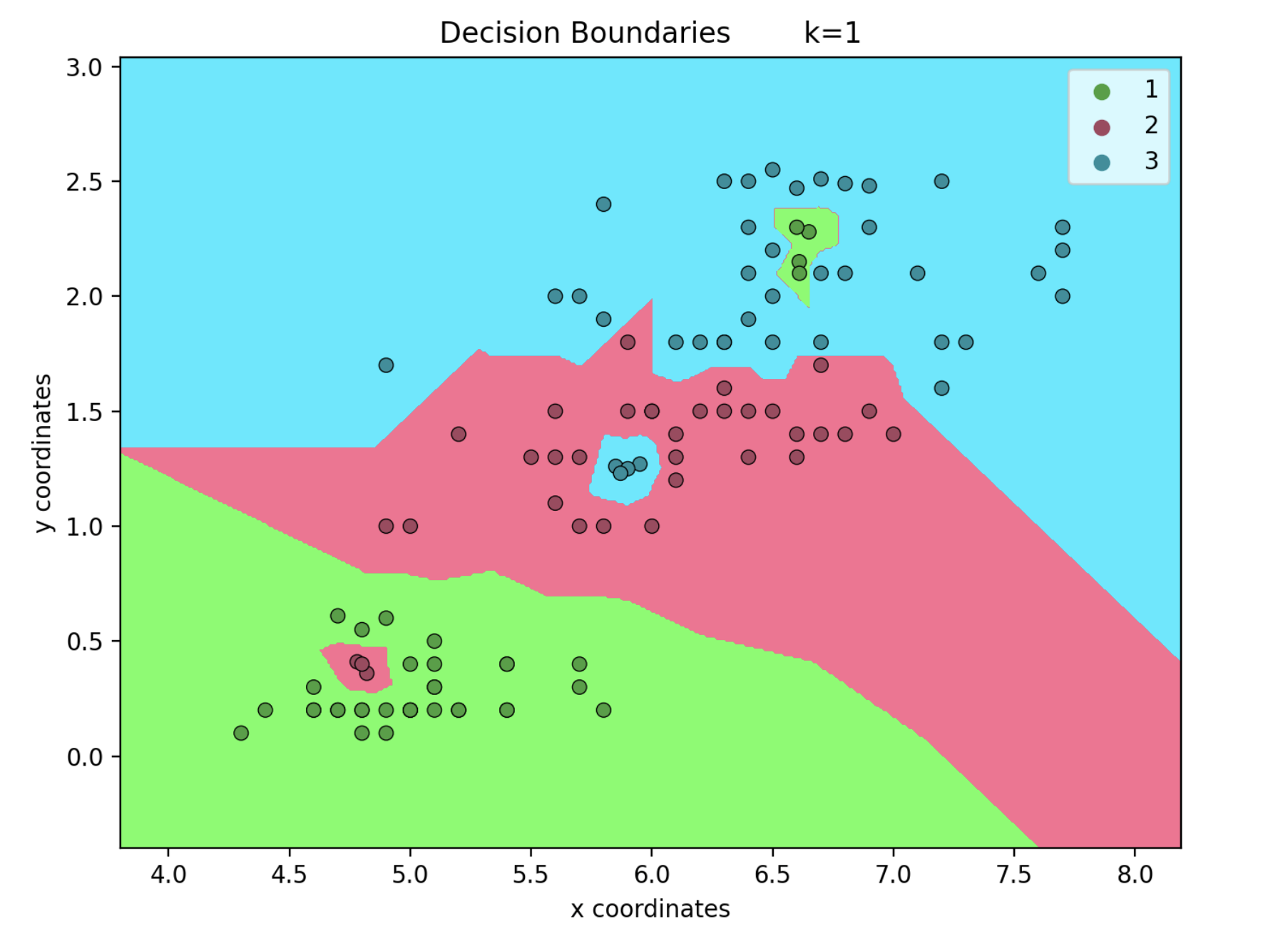
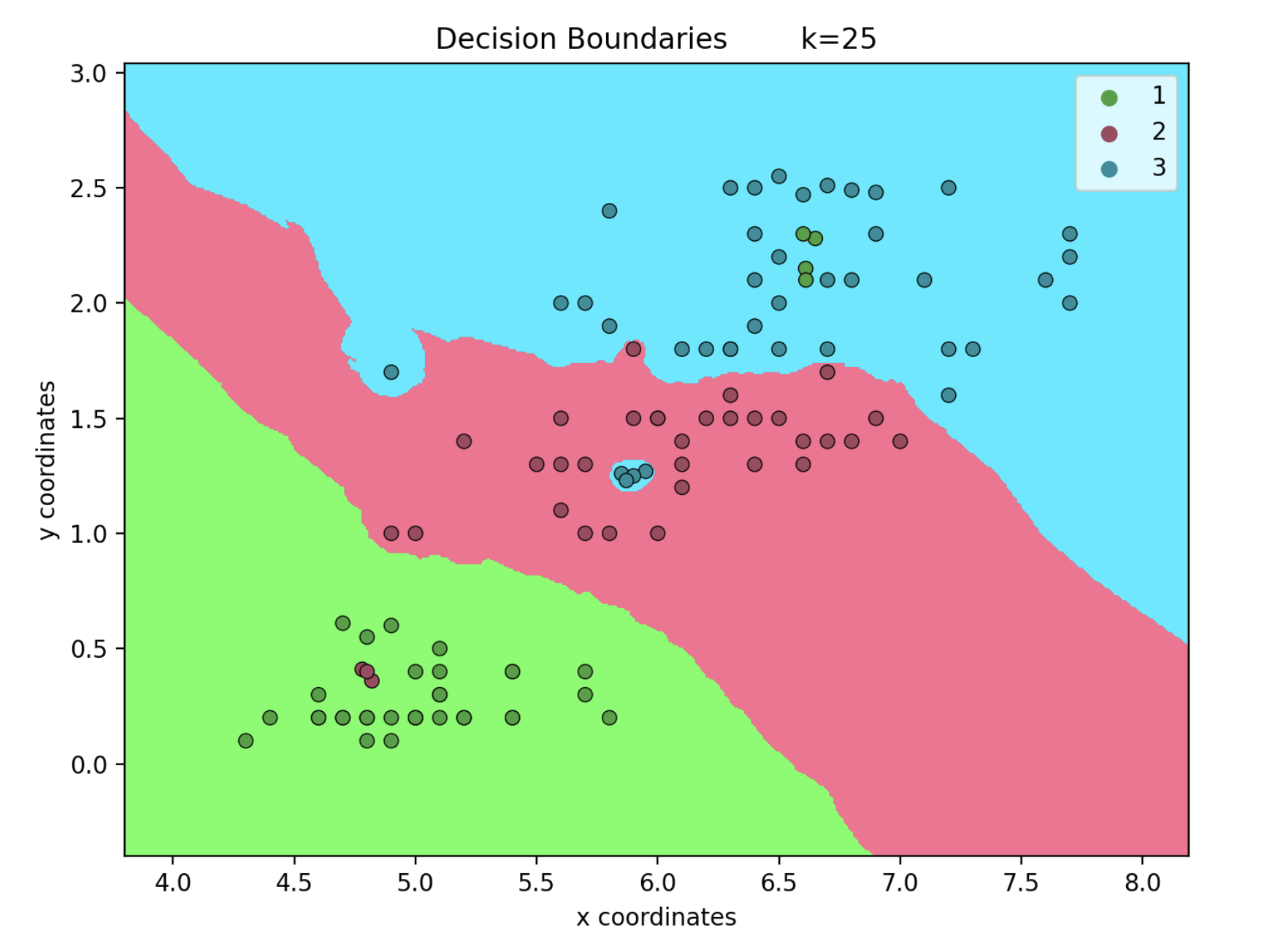
When k is 1, we can see that a single or a few points that are outside of their expected region can influence the boundaries a lot. However when k is 25, these outliers have a much less impact on the boundaries. This is because we only take into account the single closest point when k is 1.

 10 Sep 30, 2022
10 Sep 30, 2022
 16 Sep 12, 2022
16 Sep 12, 2022
 100 Dec 28, 2022
100 Dec 28, 2022
 997 Jan 09, 2023
997 Jan 09, 2023
 24 Dec 17, 2022
24 Dec 17, 2022
 87 Dec 24, 2022
87 Dec 24, 2022
 421 Dec 29, 2022
421 Dec 29, 2022
 1 Jan 10, 2022
1 Jan 10, 2022
 472 Jan 06, 2023
472 Jan 06, 2023
 2 Mar 28, 2022
2 Mar 28, 2022
 132 Dec 18, 2022
132 Dec 18, 2022
 128 Nov 29, 2022
128 Nov 29, 2022
 2 Nov 14, 2022
2 Nov 14, 2022
 412 Dec 28, 2022
412 Dec 28, 2022
 75 Dec 02, 2022
75 Dec 02, 2022
 97 Dec 17, 2022
97 Dec 17, 2022
 46 Oct 24, 2022
46 Oct 24, 2022
 118 Dec 29, 2022
118 Dec 29, 2022
 46 Nov 20, 2022
46 Nov 20, 2022