Panoptic NeRF
Project Page | Paper | Dataset
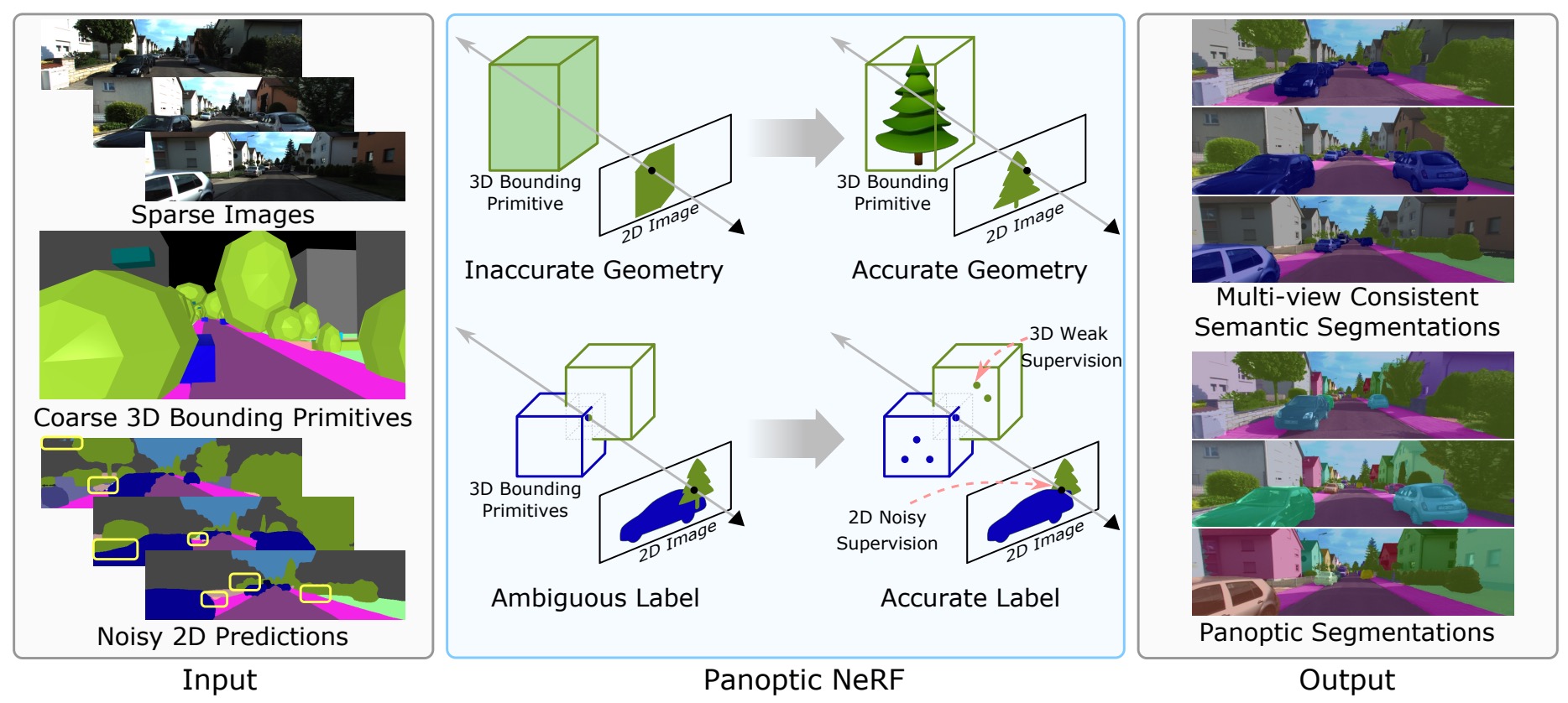
Panoptic NeRF: 3D-to-2D Label Transfer for Panoptic Urban Scene Segmentation
Xiao Fu*, Shangzhan zhang*, Tianrun Chen, Yichong Lu, Lanyun Zhu, Xiaowei Zhou, Andreas Geiger, Yiyi Liao
arXiv 2022
Installation
- Create a virtual environment via
conda.conda create -n panopticnerf python=3.7 conda activate panopticnerf - Install
torchandtorchvision.conda install pytorch torchvision torchaudio cudatoolkit=11.3 -c pytorch - Install requirements.
pip install -r requirements.txt
Data Preparation
-
We evaluate our model on KITTI-360. Here we show the structure of a test dataset as follow. You can download it from here and then put it into
$ROOT(RGBs should query the KITTI-360 website).├── KITTI-360 ├── 2013_05_28_drive_0000_sync ├── image_00 ├── image_01 ├── bbx_intersection ├── *_00.npz ├── *_01.npz ├── calibration ├── calib_cam_to_pose.txt ├── perspective.txt ├── data_3d_bboxes ├── data_poses ├── cam0_to_world.txt ├── poses.txt ├── pspnet ├── sgm ├── visible_idfile Intro image_00/01stereo RGB images pspnet2D pseudo ground truth sgmweak stereo depth supervision visible_idper-frame bounding primitive IDs data_posessystem poses in a global Euclidean coordinate calibrationextrinsics and intrinsics of the perspective cameras bbx_intersectionray-mesh intersections, containing depths between hitting points and camera origin, semantic label IDs and bounding primitive IDs -
Generate ray-mesh intersections (
bbx_intersection/*.npz). The red dots and blue dots indicate where the rays hit into and out of the meshes, respectively. For the given test scene,START=3353,NUM=64.# image_00 python mesh_intersection.py intersection_start_frame ${START} intersection_frames ${NUM} use_stereo False # image_01 python mesh_intersection.py intersection_start_frame ${START} intersection_frames ${NUM} use_stereo True

- Evaluate the origin of a scene (
center_pose) and the distance from the origin to the furthest bounding primitive (dist_min). Then accordingly modify the.yamlfile.python recenter_pose.py recenter_start_frame ${START} recenter_frames ${NUM}
Training and Visualization
-
We provide the training code. Replace
resume Falsewithresume Trueto load the pretained model.python train_net.py --cfg_file configs/panopticnerf_test.yaml pretrain nerf gpus '1,' use_stereo True use_pspnet True use_depth True pseudo_filter True weight_th 0.05 resume False -
Render semantic map, panoptic map and depth map in a single forward pass, which takes around 10s per-frame on a single 3090 GPU. Please make sure to maximize the GPU memory utilization by increasing the size of the chunk to reduce inference time. Replace
use_stereo Falsewithuse_stereo Trueto render the right views.python run.py --type visualize --cfg_file configs/panopticnerf_test.yaml use_stereo False
-
Visualize novel view appearance & label synthesis. Before rendering, select a frame and generate corresponding ray-mesh intersections with respect to its novel spiral poses by enabling
spiral poses==Trueinlib.datasets.kitti360.panopticnerf.py.
Evaluation
├── KITTI-360
├── gt_2d_semantics
├── gt_2d_panoptics
├── lidar_depth
-
Download the corresponding pretrained model and put it to
$ROOT/data/trained_model/panopticnerf/panopticnerf_test/latest.pth. -
We provide some semantic & panoptic GTs and LiDAR point clouds for evaluation. The details of evaluation metrics can be found in the paper.
-
Eval mean intersection-over-union (mIoU)
python run.py --type eval_miou --cfg_file configs/panopticnerf_test.yaml use_stereo False
- Eval panoptic quality (PQ)
sh eval_pq_test.sh
- Eval depth with 0-100m LiDAR point clouds, where the far depth can be adjusted to evaluate the closer scene.
python run.py --type eval_depth --cfg_file configs/panopticnerf_test.yaml use_stereo False max_depth 100.
- Eval Multi-view Consistency (MC)
python eval_consistency.py --cfg_file configs/panopticnerf_test.yaml use_stereo False consistency_thres 0.1
News
12/04/2022Code released.29/03/2022Repo created. Code will come soon.
Citation
@article{fu2022panoptic,
title={Panoptic NeRF: 3D-to-2D Label Transfer for Panoptic Urban Scene Segmentation},
author={Fu, Xiao and Zhang, Shangzhan and Chen, Tianrun and Lu, Yichong and Zhu, Lanyun and Zhou, Xiaowei and Geiger, Andreas and Liao, Yiyi},
journal={arXiv preprint arXiv:2203.15224},
year={2022}
}
Copyright © 2022, Zhejiang University. All rights reserved. We favor any positive inquiry, please contact [email protected].

 66 Dec 16, 2022
66 Dec 16, 2022
 587 Dec 30, 2022
587 Dec 30, 2022
 4 Jul 27, 2022
4 Jul 27, 2022
 82 Jan 04, 2023
82 Jan 04, 2023
 92 Jan 02, 2023
92 Jan 02, 2023
 561 Dec 01, 2022
561 Dec 01, 2022
 7 Oct 13, 2022
7 Oct 13, 2022
 28 Jan 01, 2023
28 Jan 01, 2023
 62 Dec 20, 2022
62 Dec 20, 2022
 2.5k Dec 26, 2022
2.5k Dec 26, 2022
 42 Aug 14, 2022
42 Aug 14, 2022
 4.5k Jan 02, 2023
4.5k Jan 02, 2023
 35 Oct 26, 2022
35 Oct 26, 2022
 5 Jan 15, 2022
5 Jan 15, 2022
 435 Jan 06, 2023
435 Jan 06, 2023
 125 Jan 03, 2023
125 Jan 03, 2023
 2.5k Jan 02, 2023
2.5k Jan 02, 2023
 25 Dec 26, 2022
25 Dec 26, 2022
 6 Jul 08, 2021
6 Jul 08, 2021
 358 Jan 02, 2023
358 Jan 02, 2023