DRLib:A concise deep reinforcement learning library, integrating HER and PER for almost off policy RL algos
A concise deep reinforcement learning library, integrating HER and PER for almost off policy RL algos. With tensorflow1.14 and pytorch, add HER and PER, core codes based on https://github.com/openai/spinningup
Compared with spinning up, I delete multi-process and experimental grid wrapper, and our advantage is that it is convenient to debug with pycharm~
项目特点:
-
tf1和pytorch两个版本的算法,前者快,后者新,任君选择;
-
在spinup的基础上,封装了DDPG, TD3, SAC等主流强化算法,相比原来的函数形式的封装,调用更方便,且加了pytorch的GPU调用;
-
添加了HER和PER功能,非常适合做机器人相关任务的同学们;
-
去除了自动调参(ExperimentGrid)和多进程(MPI_fork)部分,适合新手在pycharm中debug,前者直接跑经常会报错~ 等我熟练了这两个,我再加上去,并附上详细教程;
-
最后,全网最详细的环境配置教程!亲测两个小时内,从零配置完全套环境!
-
求三连,不行求个star!
1. Installation
-
Clone the repo and cd into it:
git clone https://github.com/kaixindelele/DRLib.git cd DRLib -
Create anaconda DRLib_env env:
conda create -n DRLib_env python=3.6.9 source activate DRLib_env -
Install pip_requirement.txt:
pip install -r pip_requirement.txt
If installation of mpi4py fails, try the following command(Only this one can be installed successfully!):
conda install mpi4py
-
Install tensorflow-gpu=1.14.0
conda install tensorflow-gpu==1.14.0 # if you have a CUDA-compatible gpu and proper drivers -
Install torch torchvision
# CUDA 9.2 conda install pytorch==1.6.0 torchvision==0.7.0 cudatoolkit=9.2 -c pytorch # CUDA 10.1 conda install pytorch==1.6.0 torchvision==0.7.0 cudatoolkit=10.1 -c pytorch # CUDA 10.2 conda install pytorch==1.6.0 torchvision==0.7.0 cudatoolkit=10.2 -c pytorch # CPU Only conda install pytorch==1.6.0 torchvision==0.7.0 cpuonly -c pytorch # or pip install pip --default-timeout=100 install torch -i http://pypi.douban.com/simple --trusted-host pypi.douban.com [pip install torch 在线安装!非离线!](https://blog.csdn.net/hehedadaq/article/details/111480313)
-
Install mujoco and mujoco-py
refer to: https://blog.csdn.net/hehedadaq/article/details/109012048
-
Install gym[all]
refer to https://blog.csdn.net/hehedadaq/article/details/110423154
2. Training models
- Example 1. SAC-tf1-HER-PER with FetchPush-v1:
- modify params in arguments.py, choose env, RL-algorithm, use PER and HER or not, gpu-id, and so on.
- run with train_tf.py or train_torch.py
python train_tf.py
- exp results to local:https://blog.csdn.net/hehedadaq/article/details/114045615
- plot results:https://blog.csdn.net/hehedadaq/article/details/114044217
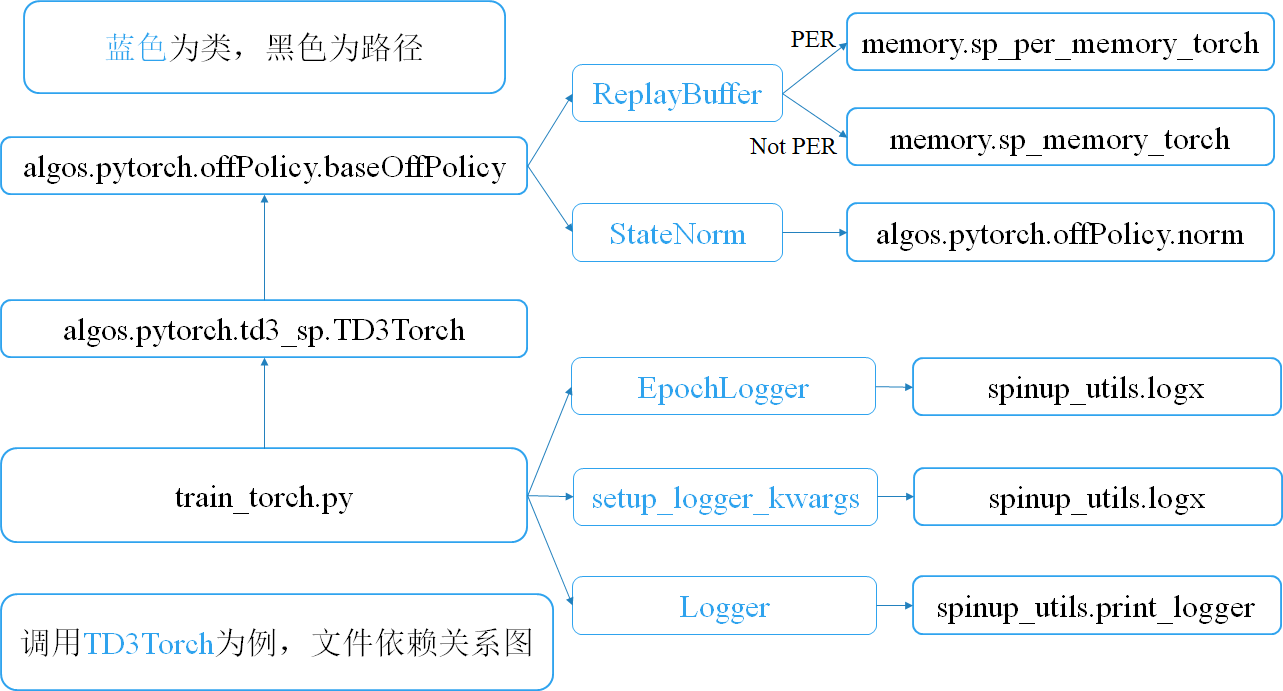
3. File tree and introduction:
.
├── algos
│ ├── pytorch
│ │ ├── ddpg_sp
│ │ │ ├── core.py-------------It's copied directly from spinup, and modified some details.
│ │ │ ├── ddpg_per_her.py-----inherits from offPolicy.baseOffPolicy, can choose whether or not HER and PER
│ │ │ ├── ddpg.py-------------It's copied directly from spinup
│ │ │ ├── __init__.py
│ │ ├── __init__.py
│ │ ├── offPolicy
│ │ │ ├── baseOffPolicy.py----baseOffPolicy, can be used to DDPG/TD3/SAC and so on.
│ │ │ ├── norm.py-------------state normalizer, update mean/std with training process.
│ │ ├── sac_auto
│ │ ├── sac_sp
│ │ │ ├── core.py-------------likely as before.
│ │ │ ├── __init__.py
│ │ │ ├── sac_per_her.py
│ │ │ └── sac.py
│ │ └── td3_sp
│ │ ├── core.py
│ │ ├── __init__.py
│ │ ├── td3_gpu_class.py----td3_class modified from spinup
│ │ └── td3_per_her.py
│ └── tf1
│ ├── ddpg_sp
│ │ ├── core.py
│ │ ├── DDPG_class.py------------It's copied directly from spinup, and wrap algorithm from function to class.
│ │ ├── DDPG_per_class.py--------Add PER.
│ │ ├── DDPG_per_her_class.py----DDPG with HER and PER without inheriting from offPolicy.
│ │ ├── DDPG_per_her.py----------Add HER and PER.
│ │ ├── DDPG_sp.py---------------It's copied directly from spinup, and modified some details.
│ │ ├── __init__.py
│ ├── __init__.py
│ ├── offPolicy
│ │ ├── baseOffPolicy.py
│ │ ├── core.py
│ │ ├── norm.py
│ ├── sac_auto--------------------SAC with auto adjust alpha parameter version.
│ │ ├── core.py
│ │ ├── __init__.py
│ │ ├── sac_auto_class.py
│ │ ├── sac_auto_per_class.py
│ │ └── sac_auto_per_her.py
│ ├── sac_sp--------------------SAC with alpha=0.2 version.
│ │ ├── core.py
│ │ ├── __init__.py
│ │ ├── SAC_class.py
│ │ ├── SAC_per_class.py
│ │ ├── SAC_per_her.py
│ │ ├── SAC_sp.py
│ └── td3_sp
│ ├── core.py
│ ├── __init__.py
│ ├── TD3_class.py
│ ├── TD3_per_class.py
│ ├── TD3_per_her_class.py
│ ├── TD3_per_her.py
│ ├── TD3_sp.py
├── arguments.py-----------------------hyperparams scripts
├── drlib_tree.txt
├── HER_DRLib_exps---------------------demo exp logs
│ ├── 2021-02-21_HER_TD3_FetchPush-v1
│ │ ├── 2021-02-21_18-26-08-HER_TD3_FetchPush-v1_s123
│ │ │ ├── checkpoint
│ │ │ ├── config.json
│ │ │ ├── params.data-00000-of-00001
│ │ │ ├── params.index
│ │ │ ├── progress.txt
│ │ │ └── Script_backup.py
├── memory
│ ├── __init__.py
│ ├── per_memory.py--------------mofan version
│ ├── simple_memory.py-----------mofan version
│ ├── sp_memory.py---------------spinningup tf1 version, simple uniform buffer memory class.
│ ├── sp_memory_torch.py---------spinningup torch-gpu version, simple uniform buffer memory class.
│ ├── sp_per_memory.py-----------spinningup tf1 version, PER buffer memory class.
│ └── sp_per_memory_torch.py
├── pip_requirement.txt------------pip install requirement, exclude mujoco-py,gym,tf,torch.
├── spinup_utils-------------------some utils from spinningup, about ploting results, logging, and so on.
│ ├── delete_no_checkpoint.py----delete the folder where the experiment did not complete.
│ ├── __init__.py
│ ├── logx.py
│ ├── mpi_tf.py
│ ├── mpi_tools.py
│ ├── plot.py
│ ├── print_logger.py------------save the information printed by the terminal to the local log file。
│ ├── run_utils.py---------------now I haven't used it. I have to learn how to multi-process.
│ ├── serialization_utils.py
│ └── user_config.py
├── train_tf1.py--------------main.py for tf1
└── train_torch.py------------main.py for torch
4. HER introduction:
Refer to these code bases:
-
It can be converged, but this code is too difficult. https://github.com/openai/baselines
-
It can also converged, but only for DDPG-torch-cpu. https://github.com/sush1996/DDPG_Fetch
-
It can not be converged, but this code is simpler. https://github.com/Stable-Baselines-Team/stable-baselines
4.1. My understanding and video:
种瓜得豆来解释her: 第一步在春天(state),种瓜(origin-goal)得豆,通过HER,把目标换成种豆,按照之前的操作,可以学会在春天种豆得豆; 第二步种米得瓜,学会种瓜得瓜; 即只要是智能体中间经历过的状态,都可以当做它的目标,进行学会。 即如果智能体能遍历所有的状态空间,那么它就可以学会达到整个状态空间。
https://www.bilibili.com/video/BV1BA411x7Wm
4.2. Key tricks for HER:
- state-normalize: success rate from 0 to 1 for FetchPush-v1 task.
- Q-clip: success rate from 0.5 to 0.7 for FetchPickAndPlace-v1 task.
- action_l2: little effect for Push task.
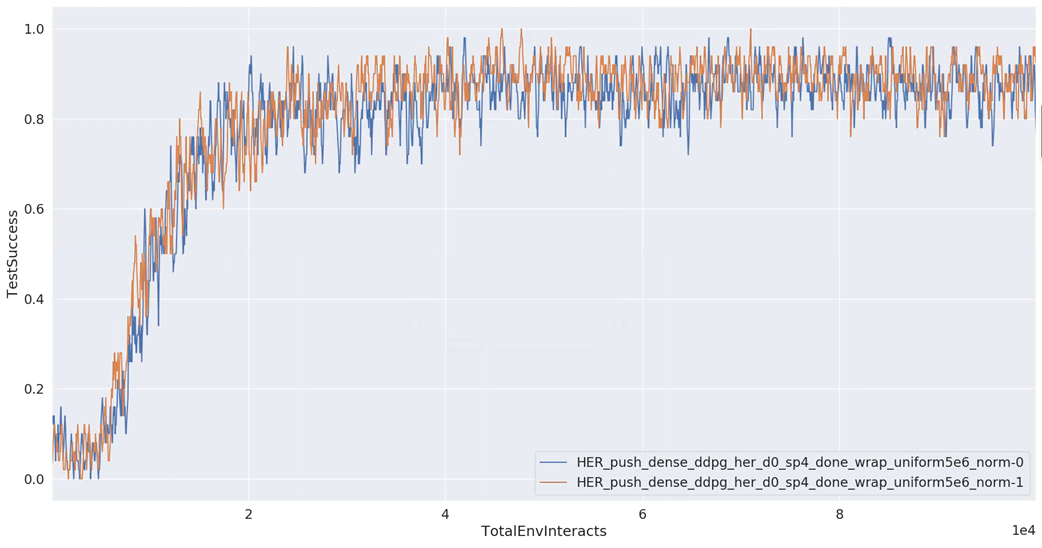
4.3. Performance about HER-DDPG with FetchPush-v1:
5. PER introduction:
refer to:off-policy全系列(DDPG-TD3-SAC-SAC-auto)+优先经验回放PER-代码-实验结果分析
6. Summary:
这个库我封装了好久,整个代码库简洁、方便、功能比较齐全,在环境配置这块几乎是手把手教程,希望能给大家节省一些时间~
从零开始配置,不到两小时,从下载代码库,到配置环境,到在自己的环境中跑通,全流程非常流畅。
6.1. 下一步添加的功能:
-
PPO的封装;
-
DQN的封装;
-
多进程的封装;
-
ExperimentGrid的封装;
7. Contact:
深度强化学习-DRL:799378128
欢迎关注知乎帐号:未入门的炼丹学徒

 22 Jan 02, 2023
22 Jan 02, 2023
 1 Jan 17, 2022
1 Jan 17, 2022
 12 Sep 08, 2022
12 Sep 08, 2022
 242 Jan 08, 2023
242 Jan 08, 2023
 99 Dec 09, 2022
99 Dec 09, 2022
 21 Nov 28, 2022
21 Nov 28, 2022
 800 Dec 31, 2022
800 Dec 31, 2022
 50 Nov 17, 2022
50 Nov 17, 2022
 46 Dec 25, 2022
46 Dec 25, 2022
 8 Mar 26, 2022
8 Mar 26, 2022
 113 Nov 29, 2022
113 Nov 29, 2022
 134 Dec 08, 2022
134 Dec 08, 2022
 1 Oct 08, 2021
1 Oct 08, 2021
 23 Oct 19, 2022
23 Oct 19, 2022
 12 Sep 02, 2022
12 Sep 02, 2022
 37 Dec 01, 2022
37 Dec 01, 2022
 192 Dec 20, 2022
192 Dec 20, 2022
 3k Jan 03, 2023
3k Jan 03, 2023
 3 Feb 04, 2022
3 Feb 04, 2022
 192 Dec 23, 2022
192 Dec 23, 2022