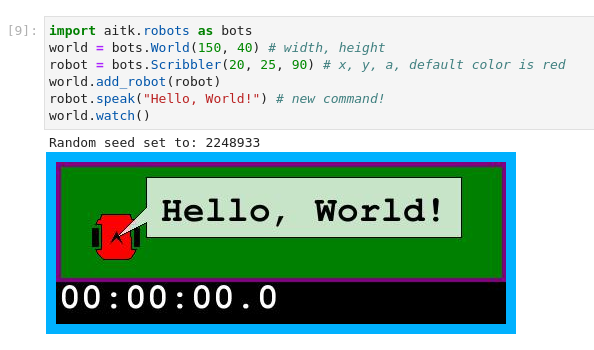
aitk.robots

A lightweight Python robot simulator for JupyterLab, Notebooks, and other Python environments.
Goals
- A lightweight mobile robotics simulator
- Usable in the classroom, research, or exploration
- Explore wheeled robots with range, cameras, smell, and light sensors
- Operate quickly without a huge amount of resources
- Create reproducible experiments
- Designed for exposition, experimentation, and analysis
- Sensors designed for somewhat realistic problems (such as image recognition)
- Especially designed to work easily with Machine Learning and Artificial Intelligence systems
Installation
For the core operations, you will need to install just aitk.robots:
pip install aitk.robots
To use the Jupyter enhancements, you'll also need the browser-based extensions. You can install those with:
jupyter labextension install @jupyter-widgets/jupyterlab-manager
If not in a conda environment, then you will also need to:
jupyter nbextension enable --py widgetsnbextension
For additional information, please see:



 5 Oct 04, 2021
5 Oct 04, 2021
 2 Oct 20, 2021
2 Oct 20, 2021
 1 Feb 05, 2022
1 Feb 05, 2022
 39 Jun 10, 2022
39 Jun 10, 2022
 2 Jan 09, 2022
2 Jan 09, 2022
 1 Nov 18, 2021
1 Nov 18, 2021
 33 Dec 17, 2022
33 Dec 17, 2022
 2 Oct 31, 2022
2 Oct 31, 2022
 6 Nov 22, 2022
6 Nov 22, 2022
 37 Oct 21, 2022
37 Oct 21, 2022
 2.8k Jan 04, 2023
2.8k Jan 04, 2023
 1 Nov 22, 2021
1 Nov 22, 2021
 12 Aug 18, 2022
12 Aug 18, 2022
 0 Apr 02, 2022
0 Apr 02, 2022
 3 Dec 17, 2021
3 Dec 17, 2021
 1 Dec 31, 2021
1 Dec 31, 2021
 5 Feb 24, 2022
5 Feb 24, 2022
 2 Feb 02, 2022
2 Feb 02, 2022
 1 Nov 20, 2021
1 Nov 20, 2021
 2 Oct 31, 2022
2 Oct 31, 2022