当前位置:网站首页>LTH7五脚芯片的完整方案图FS4054充电电路原理
LTH7五脚芯片的完整方案图FS4054充电电路原理
2022-07-17 05:11:00 【深圳微电子技术分享博客】
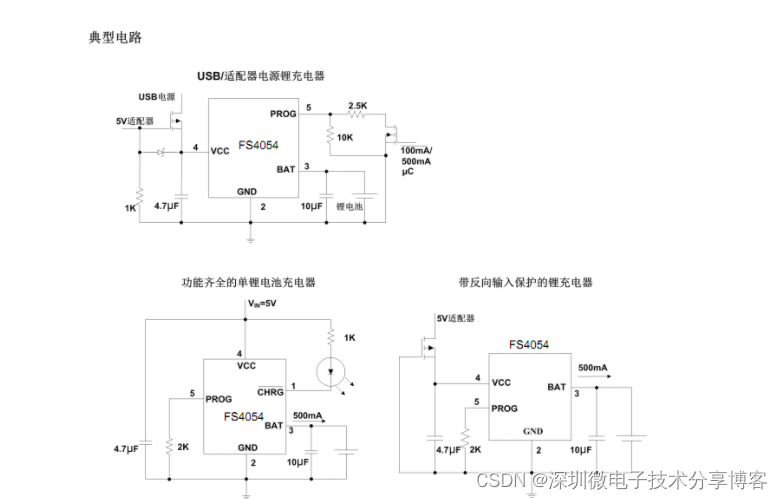
LTH7贴片5脚充电芯片 FS4054
单节的锂电池保护电路 单节为3.7V锂电池(也叫4.2V)和3.8V锂电池(也叫4.35V)
单节的锂电池充电电路 4.2V的LTH7芯片, FS4054,4.35V的LTH7芯片, FS4056
单节的锂电池输出电路 锂电池转换稳压输出为:1.2V,3.3V,5V,12V等等
1-3节锂电池的充放电芯片表 (几十个芯片分类图)
锂电池充放电整套电路组合 保护电路+充电电路+升压电路+LDO电路+降压电路
在锂电池上,需要三个电路系统: 1,锂电池保护电路, 2,锂电池充电电路, 3,锂电池输出电路。边充电边放电,从这里可以看出是锂电池充电电路与锂电池两者一起给锂电池输出电路供电。A ,LTH7贴片5脚充电芯片
LTH7是单节锂电池充电电路芯片, FS4054
,负责将USB口的5V电源,转换降压适合3.7V的锂电池充电,并提供一个LED指示灯,指示充电长亮和充满灭灯的控制系统,并具有电池电压监测电路,实时监测电池电压,充满即停止充电。
搭配锂电池如:3.7V的18650,3.7V的聚合物锂电池等等如果是3.8V的锂电池,请使用FS4056了。
锂电池有3大电路系统,出了锂电池充电电路 FS4054
芯片(LTH7)外,还要其他2大基础电路。
边充电边放电,从这里可以看出是锂电池充电电路与锂电池两者一起给锂电池输出电路供电。
A ,LTH7贴片5脚充电芯片
LTH7是单节锂电池充电电路芯片,FS4054,负责将USB口的5V电源,转换降压适合3.7V的锂电池充电,并提供一个LED指示灯,指示充电长亮和充满灭灯的控制系统,并具有电池电压监测电路,实时监测电池电压,充满即停止充电。
边栏推荐
- CV学习笔记【2】:卷积与Conv2d
- PCM silent detection
- FMC子卡:4 通道 250MSPS采样率16 位 AD 采集子卡
- QuizCardGame
- Pytorch learning notes [5]: generalization using convolution
- JNI practical notes
- 李宏毅机器学习2022.7.15--梯度下降
- Transform the inriapearson data set into Yolo training format and visualize it
- USB to TTL ch340 module installation (win10)
- CUDA编程-02: 初识CUDA编程
猜你喜欢

CV-Model【2】:Alexnet

PyTorch学习笔记【4】:从图像学习

2022-7-15 廉价国产PLC工控板带485主从通信的零散记录
PyTorch学习笔记【3】:使用神经网络拟合数据

Spark source code - code analysis of core RDD part (I)

Record: yolov5 model pruning lightweight
网吧管理系统数据库设计

Sgm: sequence generation model for multi label classification

分享CS品牌贴片式T卡在打猎相机领域的运用案例

Selective Kernel Networks方法简单整理
随机推荐
Unable to determine Electron version. Please specify an Electron version
Selective Kernel Networks方法简单整理
一文读懂目标检测中的各种IoU损失函数
In VS, error c4996: 'scanf': this function or variable may be unsafe Solutions.
String distance problem
新产品如何选型Flash?
自監督學習概述
4 路 FMC+基带信号处理板( 4 路 2G 瞬时带宽 AD+DA)
Some problems in face recognition testing with facenet source code
JNI practical notes
深入理解卡尔曼滤波器(3):多维卡尔曼滤波器
Dlib library and Dat file address
The OCR tag of the pad is converted to TXT format
Sgm: sequence generation model for multi label classification
Pointnet++ code explanation (IV): index_ Points function
A Survey of Robust LiDAR-based 3D Object Detection Methods for Autonomous Driving(激光雷达3D目标检测方法)论文笔记
CUDA编程-03:线程层级
Pointnet++ code explanation (III): query_ ball_ Point function
如何优化深度学习模型以提升推理速度
重写YOLOX的TensorRT版本部署代码