当前位置:网站首页>分享CS品牌贴片式T卡在打猎相机领域的运用案例
分享CS品牌贴片式T卡在打猎相机领域的运用案例
2022-07-17 05:11:00 【深圳市雷龙发展有限公司】
最近有一些做打猎相机的工程师朋友找到我们,为此我们也对打猎相机这款产品做了一下简单的了解,这个产品是一个非常有趣的产品,原来在海外有很多的打猎爱好者,传统的打猎靠的是经验,而现在科技越来发达之后,就有了打猎相机这一款产品的诞生。
近些年,这款产品在国内也逐渐有些应用了,比如我们在电视上经常能看到野外的一些野生动物的照片或者视频。这些动物的照片是如何来的,就是来自于打猎相机。
那么到底打猎相机是一个什么样的机理呢?
简单来说,这类产品就是挂在野外的树上,内置红外感应器,在没有猎物出现的情况下,它是处于关机状态,如果有猎物出现,会立刻唤醒机器以极快的速度进行抓拍。
为什么说这样的一款产品会用到CS品牌SD NAND(贴片式T卡)呢?

1、产品要求启动速度非常快,猎物一出现,马上开机拍照,这个时候可能连OS都没有完全启动,这个时候就需要一个存储芯片来缓存拍摄完的图片。
2、写入速度要求快,这个时候普通的NOR Flash和 NAND Flash它们满足不了这种快速写入需求。而贴片式T卡可以。
3、协议栈,以前的打猎相机存储在本地,需要定去取拍摄完的图片,而打猎相机一般都是放在深山等地方,非常的浪费人工。
那现在的打猎相机都加上4G模块了,那么本地也需要存储通讯协议栈,那这个时候对存储的空间要求大一些。
基于以上的问题,CS品牌SD NAND(贴片式T卡)就是完全符合打猎相机的产品的各方面存储需求,同时贴片式T卡在打猎相机中的应用也会越来越多了。
边栏推荐
- 【CS创世】 SD NAND和Raw NAND优劣势对比分析
- 如何将进程线程与CPU核进行绑定
- Overview of self supervised learning
- 2021-04-18
- CS品牌SD NAND与SPI NAND的对比
- CV-Model【2】:Alexnet
- CUDA编程-05:流和事件
- Spark source code - code analysis of core RDD part (I)
- Pointnet++ code details (II): Square_ Distance function
- Hanoi Tower problem -- > recursive implementation
猜你喜欢

简单Web服务器程序设计与实现

2021-05-21

CUDA编程-05:流和事件

对比学习损失函数(RINCE/ReLIC/ReLICv2)

Livedata analysis
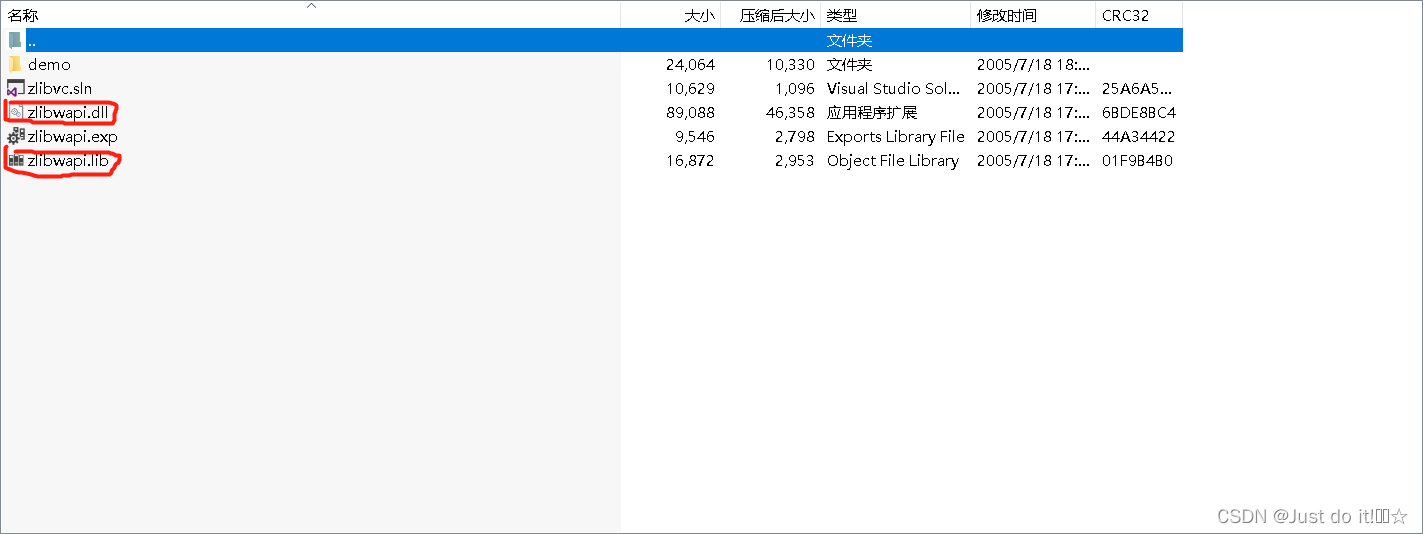
Could not locate zlibwapi. dll. Please make sure it is in your library path

基于 UltraScale FPGA+华为海思 ARM 的高性能综合视频图像处理板 / FPGA+ARM

Aperçu de l'apprentissage auto - supervisé
Design and implementation of simple web server program
CV-Model【3】:VGG16
随机推荐
对比学习损失函数(RINCE/ReLIC/ReLICv2)
Hanoi Tower problem -- > recursive implementation
Could not locate zlibwapi. dll. Please make sure it is in your library path
国产化FPGA/DSP/ZYNQ芯片&板卡方案
Problems encountered by kotlin generics
Pytorch learning notes [3]: fitting data using neural networks
Edge AI边缘智能:Communication-Efficient Edge AI: Algorithms and Systems(未完待续)
CV学习笔记【1】:transforms
Regular replace group (n) content
Write a timed self-test
C language - bubble sort
用facenet源码进行人脸识别测试过程中的一些问题
如何用NumPy读取和保存点云数据
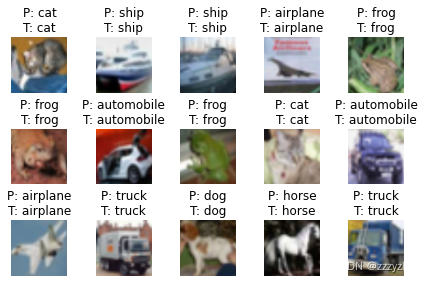
CV-Model【1】:Mnist
About terminating tasks in thread pool
Pointnet++ code explanation (IV): index_ Points function
Image compression based on Quadtree
7种视觉MLP整理(下)
7种视觉MLP整理(上)
SD NAND与eMMC优劣势对比