Factorized Fourier Neural Operators
This repository contains the code to reproduce the results in our NeurIPS 2021 ML4PS workshop paper, Factorized Fourier Neural Operators.
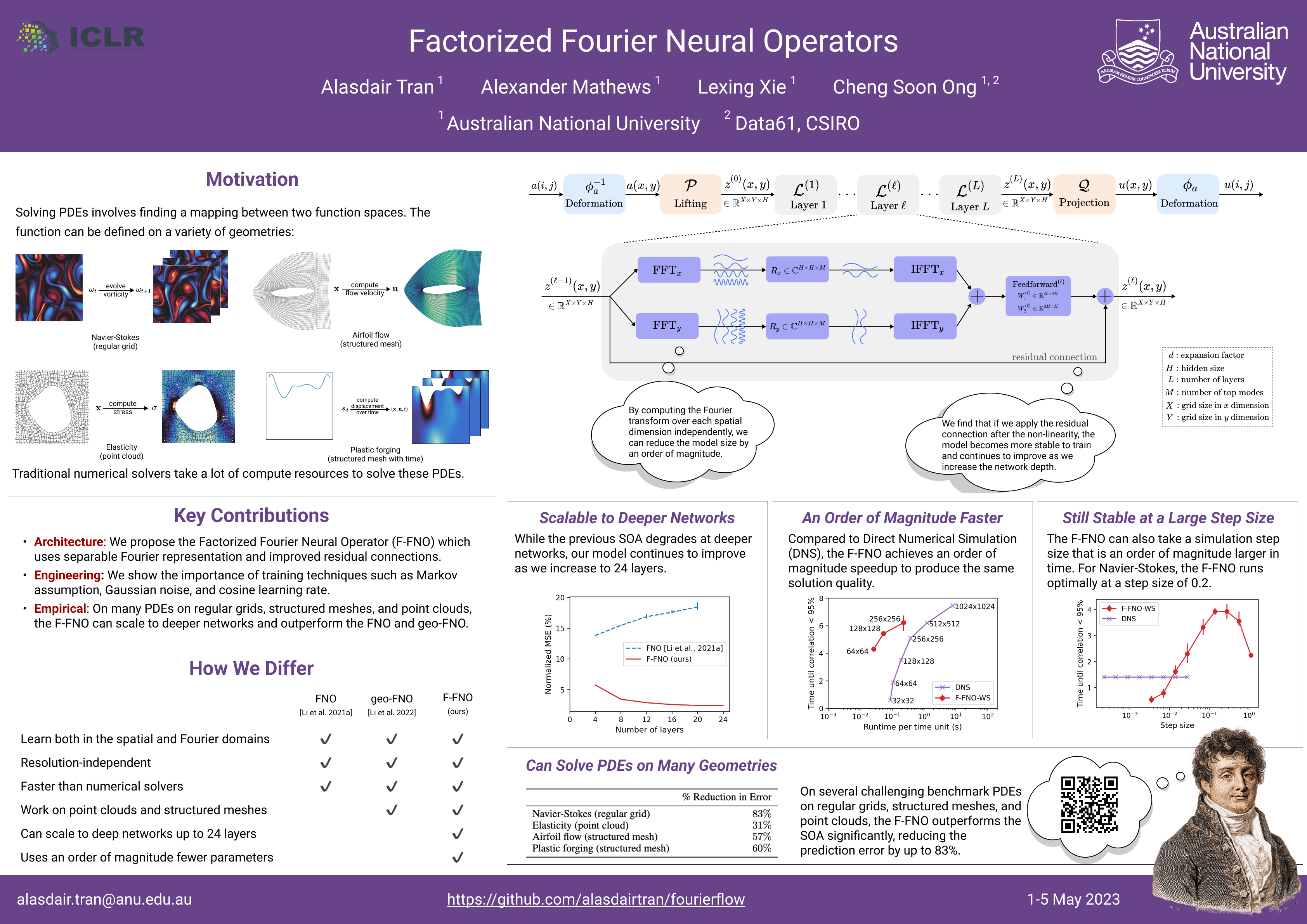
The Fourier Neural Operator (FNO) is a learning-based method for efficiently simulating partial differential equations. We propose the Factorized Fourier Neural Operator (F-FNO) that allows much better generalization with deeper networks. With a careful combination of the Fourier factorization, weight sharing, the Markov property, and residual connections, F-FNOs achieve a six-fold reduction in error on the most turbulent setting of the Navier-Stokes benchmark dataset. We show that our model maintains an error rate of 2% while still running an order of magnitude faster than a numerical solver, even when the problem setting is extended to include additional contexts such as viscosity and time-varying forces. This enables the same pretrained neural network to model vastly different conditions.
Getting Started
# Set up pyenv and pin python version to 3.9.7
curl https://pyenv.run | bash
# Configure our shell's environment for pyenv
pyenv install 3.9.7
pyenv local 3.9.7
# Set up poetry
curl -sSL https://raw.githubusercontent.com/python-poetry/poetry/master/install-poetry.py | python -
export PATH="$HOME/.local/bin:$PATH"
# Install all python dependencies
poetry install
source .venv/bin/activate # or: poetry shell
# If we need to use Jupyter notebooks
python -m ipykernel install --user --name fourierflow --display-name "fourierflow"
# Temp fix until allennlp has upgraded transformers dependencies to 4.11
poe update-transformers
# Manually reinstall Pytorch with CUDA 11.1 support
# Monitor poetry's support for pytorch here: https://github.com/python-poetry/poetry/issues/2613
poe install-torch-cuda11
# set default paths
cp example.env .env
# The environment variables in .env will be loaded automatically when running
# fourierflow train, but we can also load them manually in our terminal
export $(cat .env | xargs)
# Alternatively, you can pass the paths to the system using env vars, e.g.
FNO_DATA_ROOT=/My/Data/Location fourierflow
Navier Stokes Experiments
You can download all of our datasets and pretrained model as follows:
# Datasets (209GB)
wget --continue https://object-store.rc.nectar.org.au/v1/AUTH_c0e4d64401cf433fb0260d211c3f23f8/fourierflow/data.tar.gz
tar -zxvf data.tar.gz
# Pretrained models and results (30GB)
wget --continue https://object-store.rc.nectar.org.au/v1/AUTH_c0e4d64401cf433fb0260d211c3f23f8/fourierflow/experiments.tar.gz
tar -zxvf experiments.tar.gz
Alternatively, you can also generate the datasets from scratch:
# Download Navier Stokes datasets
fourierflow download fno
# Generate Navier Stokes on toruses with a different forcing function and
# viscosity for each sample. Takes 14 hours.
fourierflow generate navier-stokes --force random --cycles 2 --mu-min 1e-5 \
--mu-max 1e-4 --steps 200 --delta 1e-4 \
data/navier-stokes/random_force_mu.h5
# Generate Navier Stokes on toruses with a different time-varying forcing
# function and a different viscosity for each sample. Takes 21 hours.
fourierflow generate navier-stokes --force random --cycles 2 --mu-min 1e-5 \
--mu-max 1e-4 --steps 200 --delta 1e-4 --varying-force \
data/navier-stokes/random_varying_force_mu.h5
# If we decrease delta from 1e-4 to 1e-5, generating the same dataset would now
# take 10 times as long, while the difference between the solutions in step 20
# is only 0.04%.
Training and test commands:
# Reproducing SOA model on Navier Stokes from Li et al (2021).
fourierflow train --trial 0 experiments/navier_stokes_4/zongyi/4_layers/config.yaml
# Train with our best model
fourierflow train --trial 0 experiments/navier_stokes_4/markov/24_layers/config.yaml
# Get inference time on test set
fourierflow predict --trial 0 experiments/navier_stokes_4/markov/24_layers/config.yaml
Visualization commands:
# Create all plots and tables for paper
fourierflow plot layer
fourierflow plot complexity
fourierflow plot table-3
# Create the flow animation for presentation
fourierflow plot flow
# Create plots for the poster
fourierflow plot poster

 11.3k Dec 30, 2022
11.3k Dec 30, 2022
 67 Dec 27, 2022
67 Dec 27, 2022
 170.1k Jan 04, 2023
170.1k Jan 04, 2023
 194 Dec 27, 2022
194 Dec 27, 2022
 100 Dec 28, 2022
100 Dec 28, 2022
 30 Nov 30, 2022
30 Nov 30, 2022
 0 Sep 06, 2021
0 Sep 06, 2021
 131 Jan 07, 2023
131 Jan 07, 2023
 36 Jan 06, 2023
36 Jan 06, 2023
 2k Jan 05, 2023
2k Jan 05, 2023
 166 Dec 22, 2022
166 Dec 22, 2022
 11 Nov 08, 2022
11 Nov 08, 2022
 249 Jan 03, 2023
249 Jan 03, 2023
 36 Sep 14, 2022
36 Sep 14, 2022
 80 Dec 30, 2022
80 Dec 30, 2022
 2 Jan 03, 2022
2 Jan 03, 2022
 13 Jan 02, 2023
13 Jan 02, 2023
 7 Oct 23, 2021
7 Oct 23, 2021
 40 Dec 14, 2022
40 Dec 14, 2022
 48 Dec 20, 2022
48 Dec 20, 2022