当前位置:网站首页>Deep clustering correlation (three articles)
Deep clustering correlation (three articles)
2022-07-19 05:47:00 【byzy】
One 、Deep Clustering for Unsupervised Learning of Visual Features
Link to the original text :https://arxiv.org/pdf/1807.05520.pdf
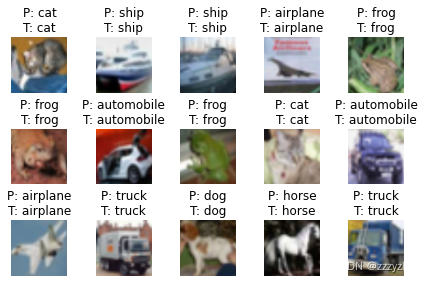
Unsupervised learning methods that do not require labels at all , It seems to be to learn good feature expression ( Of course, downstream tasks definitely need labels ).
Network structure

Will all  Input images into convolutional neural network to get expression ( Or characteristics )( Set input
Input images into convolutional neural network to get expression ( Or characteristics )( Set input  Corresponding output
Corresponding output  ). Then enter into two branches : Classification branch and clustering Branch .
). Then enter into two branches : Classification branch and clustering Branch .
Cluster branch First cluster in some way ( Such as K-means), Get the of each picture “ Pseudo label ”![y_n=[0,\cdots,0,1,0,\cdots,0]](http://img.inotgo.com/imagesLocal/202207/19/202207170508421220_30.gif) , And calculate the clustering loss (
, And calculate the clustering loss ( Is the parameter matrix to be learned ):
Is the parameter matrix to be learned ):

among  .
.
The taxonomic Branch Then use the classification header ( ) Predicted results , Compare with pseudo tags , Calculate the classification loss (log-softmax):
) Predicted results , Compare with pseudo tags , Calculate the classification loss (log-softmax):

To prevent trivial solutions : When a cluster  It's empty time , Randomly select a non empty cluster
It's empty time , Randomly select a non empty cluster  , The centroid with small random disturbance is used as the empty cluster New center of mass . then , Will belong to a non empty cluster The points of are reassigned to two result clusters ( and ); Resample the input data to make the distribution uniform .
, The centroid with small random disturbance is used as the empty cluster New center of mass . then , Will belong to a non empty cluster The points of are reassigned to two result clusters ( and ); Resample the input data to make the distribution uniform .
If the downstream task is image classification , Then discard the above classification and clustering branches , Add a new category header and fine tune .
Two 、ClusterNet: Deep Hierarchical Cluster Network with Rigorously Rotation- Invariant Representation for Point Cloud Analysis
Link to the original text :ClusterNet: Deep Hierarchical Cluster Network With Rigorously Rotation-Invariant Representation for Point Cloud Analysis | IEEE Conference Publication | IEEE Xplore
Strictly rotation invariant (RRI) mapping
Satisfy :
And the number of points before and after mapping remains unchanged . among
Is the set of points ( Point cloud ),
Transform for any rotation .
 Satisfy :
Satisfy : And the number of points before and after mapping remains unchanged . among
And the number of points before and after mapping remains unchanged . among  Is the set of points ( Point cloud ),
Is the set of points ( Point cloud ), Transform for any rotation .
Transform for any rotation .Use the following expression :
 .
.
among  by
by  Of K One of the nearest neighbors , Serial number is
Of K One of the nearest neighbors , Serial number is  ;
; Respectively
Respectively  -norm、
-norm、 Included angle before transformation 、 The minimum value of the included angle after transformation ; Transformation To the plane
Included angle before transformation 、 The minimum value of the included angle after transformation ; Transformation To the plane  ( And An orthogonal plane ) Orthogonal projection transformation .
( And An orthogonal plane ) Orthogonal projection transformation .
This paper proves that :(a) The above expression is RRI Of ;(b) This expression can reconstruct the point cloud ( That is, there is no loss of information except rotation information ).
Re express the above expression as

namely  .
.
Then a point It can also be seen as 4 dimension 、 Point cloud of points . And then use PointNet Extract the local information of the point , obtain
Point cloud of points . And then use PointNet Extract the local information of the point , obtain  Whitman's sign
Whitman's sign  .
.

Network structure

among EdgeConv( Aggregate the characteristics of neighbors to each point , No down sampling ):

In addition, a method for evaluating rotation invariance is also proposed benchmark: Euler axis and rotation angle are generated uniformly and randomly , Rotate each point cloud of the test set in multiple ways ( The training set does not change ), Then evaluate on the enhanced test set .
3、 ... and 、Unsupervised Feature Learning for Point Cloud Understanding by Contrasting and Clustering Using Graph Convolutional Neural Networks
Link to the original text :Unsupervised Feature Learning for Point Cloud Understanding by Contrasting and Clustering Using Graph Convolutional Neural Networks | IEEE Conference Publication | IEEE Xplore
You don't need any tags to learn the semantic features of point cloud .


ContrastNet: Divide all point clouds into two parts to get a partial set , Then two parts are randomly selected from the part set , Make a second classification judgment , That is the two one. part Whether it belongs to the same point cloud . Using cross entropy loss .
Clustering: Use K-means++ The scheme clusters the features of all point clouds , Get a fake tag .
ClusterNet: Same as the first article in this article .
Clustering losses are as follows :

ClusterNet Predict the false label of the point cloud , The corresponding losses are as follows :
summary ( Personal understanding )
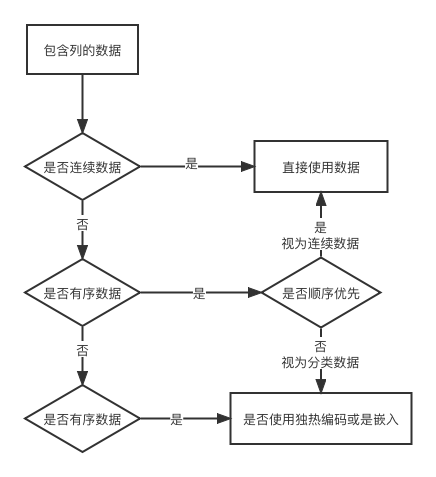
The current deep clustering algorithm combines neural network and clustering model , The total loss is equal to the sum of network loss and clustering loss . To have clustering loss requires the objective function of clustering method to be optimized ( Such as K-means、 Spectral clustering 、 Gaussian mixture model, etc , These methods often need to specify the number of clusters ).
边栏推荐
- Composants communs des applets Wechat
- Pointnet++代码详解(二):square_distance函数
- MySQL learning notes (5) -- join join table query, self join query, paging and sorting, sub query and nested query
- 简单Web服务器程序设计与实现
- Pointnet++ code explanation (IV): index_ Points function
- USB转TTL CH340模块安装(WIN10)
- INRIAPerson数据集转化为yolo训练格式并可视化
- 12. Ads layer construction of data warehouse construction
- class文件格式的理解
- Pointnet++ code explanation (V): Sample_ and_ Group function and samle_ and_ group_ All function
猜你喜欢

微信小程序的自定义组件

基于四叉树的图像压缩问题

BEVFormer: Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Trans

SGM: Sequence Generation Model for Multi-Label Classification(用于多标签分类的序列生成模型)

USB to TTL ch340 module installation (win10)
CV-Model【3】:VGG16

C语言——冒泡排序
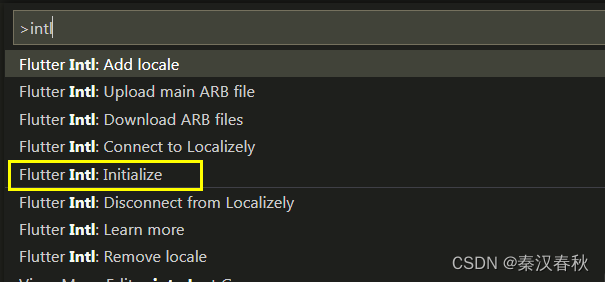
Flutter Intl的使用

微信小程序密码显示隐藏(小眼睛)
PyTorch学习笔记【1】:使用张量表征真实数据
随机推荐
使用Gson解析错误json数据
BEVFormer: Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Trans
PCM silent detection
Subtotal of pytorch installation of cuda11.0
基于bert的情感分类
微信小程序中的WXML模板语法
PyTorch学习笔记【1】:使用张量表征真实数据
3. Neusoft cross border e-commerce data warehouse project architecture design
用facenet源码进行人脸识别测试过程中的一些问题
基于opencv的检测人脸,并截取人脸
Time difference calculation
Geo_CNN(Tensorflow版本)
Solve idea new module prompt module XXXX does exits
Table field attribute query
INRIAPerson数据集转化为yolo训练格式并可视化
Time complexity and space complexity of the model
安卓实现真正安全的退出app
微信小程序的自定义组件
BottomSheetDialogFragment仿制抖音评论框
深度聚类相关(三篇文章)