当前位置:网站首页>IT4058A型号单节锂离子电池充电管理
IT4058A型号单节锂离子电池充电管理
2022-07-17 05:11:00 【深圳微电子技术分享博客】
IT4058A一款完整的单节锂离子电池充电器,带电池正负极反接保护,采用恒定电流/恒定电压线性控
制。只需较少的外部元件数目使得 便携式应用的理想选择。 可以适合 USB 电源和适配器
电源工作。
IT4058A由于采用了内部 PMOSFET 架构,加上防倒充电路,所以不需要外部检测电阻器和隔离二极管。热反馈
IT4058A可对充电电流进行自动调节,以便在大功率操作或高环境温度条件下对芯片温度加以限制。充电电流可通过
一个电阻器进行外部设置。当电池达到 Vfloat(典型值 4.22V)之后,充电电流降至设定值 1/10,
将自动终止充电。
IT4058A当输入电压(交流适配器或 USB 电源)被拿掉时, 自动进入一个低电流状态,电池漏电流在
3uA 以下。 的其他特点包括充电电流监控器、欠压闭锁、自动再充电和两个用于指示充电结束和输
入电压接入的状态引脚。
2、主要特点
预设 4.22V±1%充电电压;
充电电压外部可调,最高可接近输入电压;
涓流/恒流/恒压三段式充电,充电电流外部可调,最大充电电流可达 1A; 最大输入电压:6.3V
支持对 0V 电池充电;
待机电流小于 1uA; 短路保护功能;
BAT-VDD 电压防倒灌功能;
电池正负极反接保护,避免电池极性接反烧毁芯片; 智能温控技术,充电电流会随温度升高而降低,在不会出现过热保护的前提下输出最大充电电流;
软启动限制了浪涌电流;
可直接从 USB 端口给单节锂离子电池充电;
自动再充电;
支持 1 灯模式和两灯模式;
高度集成,极少的外围元器件
IT4058A
I
边栏推荐
- MCU的最佳存储方案CS创世 SD NAND
- Overview of self supervised learning
- HM8203线性两串充电管理控制器IC
- PyTorch学习笔记【1】:使用张量表征真实数据
- 7 kinds of visual MLP finishing (Part 1)
- 基于 UltraScale FPGA+华为海思 ARM 的高性能综合视频图像处理板 / FPGA+ARM
- Use of shutter Intl
- Pytorch learning notes [4]: learn from images
- 7种视觉MLP整理(下)
- [speech recognition] MFCC feature extraction
猜你喜欢

pcie CameraLink信号发生器(CameraLink图像模拟源)
![CV learning notes [2]: convolution and conv2d](/img/a7/e344f40e4ee6b02824304b1f6a685a.png)
CV learning notes [2]: convolution and conv2d
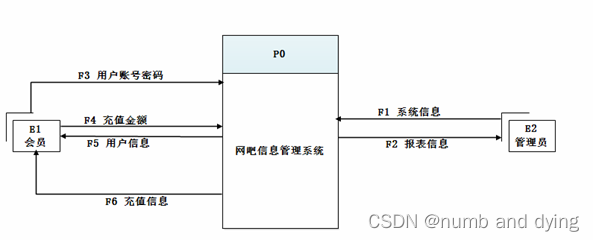
网吧管理系统数据库设计

Edge AI edge Intelligence: Communication EF "city edge ai: algorithms and systems (to be continued)

对比学习损失函数(RINCE/ReLIC/ReLICv2)

static 关键字对作用域和生命周期的影响

FMC子卡:8 通道 125MSPS采样率16 位 AD 采集子卡

重写YOLOX的TensorRT版本部署代码

KU115 FPGA 高性能万兆光纤网络硬件加速卡 / 2 路 10G 光纤数据加速卡

Review of software process and management (10)
随机推荐
用C语言实现猜数游戏
对比学习损失函数(RINCE/ReLIC/ReLICv2)
Composition of wechat applet code
[speech recognition] MFCC feature extraction
C language implementation of iteration and binary search
CV-Model【1】:Mnist
FMC子卡:8 通道 125MSPS采样率16 位 AD 采集子卡
三星系列NAND Flash有什么区别?
[附代码] 如何用HOG+SVM实现手写数字识别
PyTorch学习笔记【2】:学习的机制
CV-Model【2】:Alexnet
Contrastive learning for image semantic segmentation (two articles)
HM8203线性两串充电管理控制器IC
Review of software process and management (6)
分享CS品牌SDNAND与可穿戴设备之间成功合作
CUDA编程-03:线程层级
Pointnet++ code explanation (VI): pointnetsetabstraction layer
Dlib library and Dat file address
深度学习中常用的激活函数
Impact of static keyword on scope and lifecycle