当前位置:网站首页>欧拉角,轴角,四元数与旋转矩阵详解
欧拉角,轴角,四元数与旋转矩阵详解
2022-07-17 12:38:00 【tt丫】
入门小菜鸟,希望像做笔记记录自己学的东西,也希望能帮助到同样入门的人,更希望大佬们帮忙纠错啦~侵权立删。
目录
一、欧拉角
1、静态定义
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。
参考系又称为实验室参考系,是静止不动的。
坐标系则固定于刚体,随着刚体的旋转而旋转。
来一个经典的示例:
设定xyz-轴为参考系的参考轴(即下图蓝色部分)。称xy-平面与XY-平面的相交为交点线,用英文字母(N)代表。zxz顺规的欧拉角可以静态地这样定义:
α 是 x-轴与交点线的夹角,
β 是z-轴与Z-轴的夹角,
γ 是交点线与X-轴的夹角。

但是对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规规定。所以每当用到欧拉角时,我们必须明确表示出夹角的顺序,指定其参考轴
2、欧拉角的表示
首先绕z轴转动α角(如左图),然后是绕X’轴转动β角(如中间的图),最后是绕Z’轴转动γ角(如右图),这是zxz顺规(先绕z轴,再绕x轴再绕z‘轴)的欧拉角表示方法。(除了zxz顺规外还有其他的规定方法,如xyx,zyz。这里不做详述)



欧拉角包括3个旋转,根据这3个旋转来指定一个刚体的朝向。这3个旋转分别绕x轴,y轴和z轴,分别称为 Pitch,Yaw 和 Roll。

3、欧拉角表示的优缺点
优点:
(1)欧拉角由三个角度组成,直观,容易理解。
(2)可以进行从一个方向到另一个方向旋转大于180度的角度。
缺点:
(1)欧拉角是不可传递的,旋转的顺序影响旋转的结果,不同的应用又可能使用不同的旋转顺序,旋转顺序无法统一;
(2)3个旋转的角度可以不受限制,即取值范围是(-inf,inf);
(3)可能造成万向节死锁
4、欧拉角的万向节死锁(静态不存在万向锁的问题)
对于动态欧拉角(绕物体坐标系旋转),无论绕第一,三个轴转动的旋转角为多少度,只要绕第二个轴的旋转角为±90°,就会出现万向锁现象。
万向锁现象:一旦选择±90°作为pitch角,就会导致第一次旋转和第三次旋转等价,整个旋转表示系统被限制在只能绕竖直轴旋转,丢失了一个表示维度。
来个例子:
比如说我们先绕z轴转任意角度,得到下图对吧
然后咱们再绕y轴转90度,得到下图(此时Z’轴在蓝色的x-y平面上)
然后无论我们如何绕X‘轴转动,Z’轴始终在蓝色的x-y平面上,就像是被锁住了一样。

万向锁的避免问题:限制旋转的角度范围——绕第一个轴转动的旋转角限制在±180°间;绕第二个轴限制范围在±90°间。
二、四元数
1、提出意义和定义 (含轴角)
提出意义:上述欧拉角是多次旋转后才能得到,那么为什么不一步到位,只旋转一次呢?那么四元数应运而生。
定义:
对于一个物体的旋转,我们只需要知道四个值:一个旋转的向量 + 一个旋转的角度。而四元数也正是这样的设计:

其中x,y,z 代表的是向量的三维坐标,w代表的是角度
其实,四元数本质上是一个超复数:

轴角
![\quad q=\left[\begin{array}{ll} \vec{v} & w \end{array}\right]=([x,y,z]^{T},\theta)](http://img.inotgo.com/imagesLocal/202207/19/202207171238326920_3.gif) ——这种一个轴向量(单位向量)加一个绕转角度的表示方式是轴角表示方法。
——这种一个轴向量(单位向量)加一个绕转角度的表示方式是轴角表示方法。
轴角最大的一个局限就是不能进行简单的插值;
此外,轴角形式的旋转不能直接施于点或矢量,必转换为矩阵或者四元数。
2、四元数的相关计算法则
(1)加法
![q1+q2 = [\overrightarrow{v1}+\overrightarrow{v2},w1+w2]](http://img.inotgo.com/imagesLocal/202207/19/202207171238326920_19.gif)
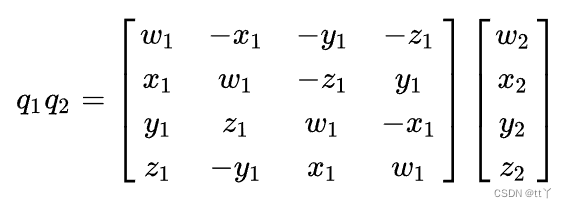
(2)乘法

单位四元数——为了表示方便,常规定:

此时复数乘法可以表示为:
![]()
也可以表示为矩阵形式
(3)共轭 —— 
3、四元数的极形式
![q=\|q\|[\vec{n} \cdot \sin \theta, \cos \theta]](http://img.inotgo.com/imagesLocal/202207/19/202207171238326920_4.gif)
其中 ||q|| 代表了四元数的模,单位四元数模为1,而θ是四元数表示的旋转过程的半角大小,也就是说2θ就是旋转角大小,n则是表示旋转轴方向的单位向量。
4、四元数的使用举例
一个向量:v1,要让它绕 v2 旋转θ度(顺时针转动)
那么有p = (v1, 0); q = ( v2 * sin(θ/2) , cos(θ/2) )
旋转后的四元数为(得到的四元数实部为0,虚部为新的坐标):
5、四元数的优缺点
优点:
- 存储空间小,计算效率高。
- 四元旋转不存在万向节锁问题。
缺点:
- 四元数的数字表示不直观。
- 单个四元数不能表示在任何方向上超过180度的旋转。
三、四元数和欧拉角间的相互转化
1、四元数转为欧拉角
设定—— 
![{\left[\begin{array}{c} \text { roll } \\ \text { pith } \\ y a w \end{array}\right]=\left[\begin{array}{c} \phi \\ \theta \\ \psi \end{array}\right]=\left[\begin{array}{l} \operatorname{atan} 2\left(\frac{2(z y+w x)}{w^{2}-x^{2}-y^{2}+z^{2}}\right) \\ \arcsin (a(w y-x z)) \\ \operatorname{atan2}\left(\frac{2(x y+w z)}{w^{2}+x^{2}-y^{2}-z^{2}}\right) \end{array}\right]=\left[\begin{array}{c} \operatorname{atan} 2\left(\frac{2(z y+w x)}{1-2\left(x^{2}+y^{2}\right)}\right) \\ \arcsin (a(w y-x z)) \\ \operatorname{atan2}\left(\frac{2(x y+w z)}{1-2\left(y^{2}+z^{2}\right)}\right) \end{array}\right]}](http://img.inotgo.com/imagesLocal/202207/19/202207171238326920_9.gif)
2、欧拉角转为四元数
我们设
则有:
![q=\left[\begin{array}{l} w \\ x \\ y \\ z \end{array}\right]=\left[\begin{array}{l} \cos (\phi / 2) \cos (\theta / 2) \cos (\psi / 2)+\sin (\phi / 2) \sin (\theta / 2) \sin (\psi / 2) \\ \sin (\phi / 2) \cos (\theta / 2) \cos (\psi / 2)-\cos (\phi / 2) \sin (\theta / 2) \sin (\psi / 2) \\ \cos (\phi / 2) \sin (\theta / 2) \cos (\psi / 2)+\sin (\phi / 2) \cos (\theta / 2) \sin (\psi / 2) \\ \cos (\phi / 2) \cos (\theta / 2) \sin (\psi / 2)-\sin (\phi / 2) \sin (\theta / 2) \cos (\psi / 2) \end{array}\right]](http://img.inotgo.com/imagesLocal/202207/19/202207171238326920_18.gif)
四、旋转矩阵
假设绕XYZ三个轴旋转的角度分别为 α ,β ,γ ,则三次旋转的旋转矩阵计算方法如下:
![\begin{array}{l} R_{x}(\alpha)=\left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos \alpha & -\sin \alpha \\ 0 & \sin \alpha & \cos \alpha \end{array}\right] \\ R_{y}(\beta)=\left[\begin{array}{ccc} \cos \beta & 0 & \sin \beta \\ 0 & 1 & 0 \\ -\sin \beta & 0 & \cos \beta \end{array}\right] \\ R_{z}(\gamma)=\left[\begin{array}{ccc} \cos \gamma & -\sin \gamma & 0 \\ \sin \gamma & \cos \gamma & \\ 0 & 0 & 1 \end{array}\right] \end{array}](http://img.inotgo.com/imagesLocal/202207/19/202207171238326920_6.gif)
若按Z-Y-X旋转顺序(指先绕自身轴Z,再绕自身轴Y,最后绕自身轴X),则旋转矩阵为:

欢迎大家在评论区中批评指正,谢谢~
边栏推荐
- 读已提交级别下 注解事务+分布式锁结合引起的事故--活动购买机会的错乱
- Stream流
- TS解决引入插件的类型文件不存在的问题
- C语言自定义类型详解
- Attachment handling of SAP Fiori
- 日期——贵州大学考研机试题目
- Solutions to notebook keyboard failure
- C# 搭建一个基于.NET5的WPF入门项目
- 微信小程序云开发 1 - 数据库
- 2022 Hunan secondary vocational group "Cyberspace Security" packet analysis infiltration Pacpng parsing (super detailed)
猜你喜欢

【PostgreSQL 】PostgreSQL 15对distinct的优化
二叉树的概念及三种遍历方法(C语言)

2022年全国最新消防设施操作员(中级消防设施操作员)模拟试题及答案

c# treeView 树形结构递归处理(企业集团型层次树形展示)

HCIA review and answer 2022.7.6
HCIA rip experiment 7.11
看一看这丑恶嘴脸 | MathWorks Account Unavailable - Technical Issue

The use and Simulation of stack and queue in STL

查找——平衡二叉树

HCIA 静态基础实验 7.8
随机推荐
Stream stream
王者荣耀商城异地多活架构设计
The R language uses the plot function in the native package (basic import package, graphics) to visualize the scatter plot
树的基本操作
华为机试:报文解压缩
R语言dplyr包select函数删除dataframe数据中包含指定字符串内容的数据列(drop columns in dataframe)
HCIA static basic experiment 7.8
[csp-j 2021] summary
R language uses LM function to build linear regression model, and uses subset function to specify the subset of data set to build regression model (uses subset function to filter the data subset that
Complete knapsack problem code template
HCIA static comprehensive experiment report 7.10
日期——贵州大学考研机试题目
机械臂速成小指南(十三):关节空间轨迹规划
内核态和用户态
二叉树的概念及三种遍历方法(C语言)
如何在双链笔记软件中建立仪表盘和知识库?以嵌入式小组件库 NotionPet 为例
STM32F407 NVIC
破案了卧槽---从MQ消费的逻辑怎么改代码都不生效
C语言自定义类型详解
[Niuke swipe questions] / *c language realizes left-hand rotation of strings*/