当前位置:网站首页>百度Apoll
百度Apoll
2022-07-17 07:40:00 【DWQY】
之前一直对百度Apoll保持很大的好奇心,趁着这次有时间简单的了解了一下。只是表面功夫,没有使用过写不出太多有价值的东西。
阿波罗github:ApolloAuto/apollo: An open autonomous driving platform (github.com)
阿波罗7.0架构图(阿波罗最新架构是7.0版本,但是发布的实际是6.0):
阿波罗实车分布图:
2019年,百度Apoll和北大联合推出一个暑假课程,放在B站上可以看,课程链接
以下是过程中做的一些笔记,发出来方便自己随时观看,有兴趣的朋友也可以看看,如果有问题也请帮我指出(其实时间有点儿久了,很多东西都可能更新了~)
无人驾驶的优势:处理的信息量更大,人类有反应时间,无人车效率高
公司:特斯拉, uber
自动驾驶等级:
L0 完全没有任何智能
L1 以人为主体,简单的汽车辅助功能
L2 以人为主体,汽车辅助(特斯拉)
L3 在部分道路情况下,车可以主体
L4 大部分情况下车为主体(Apoll的目标)
L5 车完全独立
导航地图、高精地图(车道线级别)
高精地图:给无人车预判时间、减少无人车计算量
定位:GPS、IMU、RTK(GPS基站减少偏差)
无人驾驶汽车要是用电脑控制车轮胎移动
百度有一个后台云端仿真空间,数据都会上传
无人车安全:黑客安全
安全标准:ISO26262
Apoll也用到了ros的消息转发
目前最新版本是Apollo7.0
阿波罗平台架构有四层
开发研制流程:软件在环(仿真器)、硬件在环(硬件设施)、场地在环(特定场地)、司机在环(实际道路)
硬件系统:感知、决策、控制
核心传感器:摄像头、激光雷达、毫米波雷达(发射毫米波)、组合导航
对于传感器需求:传统车企怕误检、AI怕漏检
激光雷达和摄像头都是光学传感器,存在融合可能,一体化后直接输出RGB/yuv图像
线控系统:车的移动是由命令去控制,而不是机械控制
阿波罗硬件开发平台,提供部分硬件平台型号
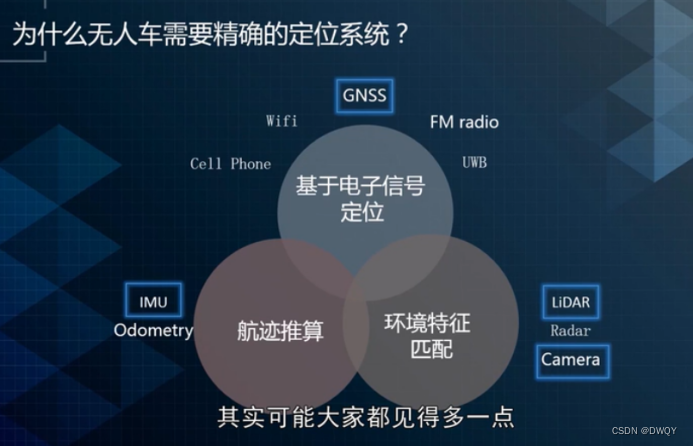
定位:四个融合(GNSS,IMU,LIDAR,CAMERA)
常用定位技术:GNSS定位技术(GPS+IMU),激光点云(2D+3D),视觉定位技术(摄像头)
定位中涉及各类传感器如何实现定位,并提高定位精度。包括IMU,各类坐标系下的转换
百度:组合导航系统(两种非相似以上)
L3以下不需要高精地图,L3,L4是标配
高精地图:不是指精度更高,指描述的更加全面,实时性更高。为机器设计

激光雷达的精度更高,但穿透力不强。在一些雾霾环境,搜索范围有限。但毫米波雷达穿透力很强
高精地图提前标注好一些静态数据,可以弥补传感器在复杂场景下的效果发挥不出来的缺点
高精度图可以提供一个离线标准,在线情况下可能遭受攻击导致精度不准(激光雷达收到磁场干扰)
最复杂的场景:雪天场景,会盖住车道线影响视觉,激光雷达受雪花影响误报障碍物
GPS实现原理:通过卫星确定空间点坐标,空间点坐标是三维坐标XYZ,通过三个方程求解,原理上三个方程由三个卫星可得,但因为实际存在测量误差,一般需要4个及以上卫星才能实现精确测量
高精地图的产生通过多传感器的融合生成(基于激光雷达、基于camera)
百度高精地图格式规范——百度OpenDrive
研究方向:用深度学习去做点云处理(点云SLAM,点云分割,点云特征提取)
地图公司:HERE,MobileEye(camera方案提供商)、Google Wego
百度Apoll方案:
Apoll提供一站式开发平台,一整套完整系统
Apoll提供高精度图数据元素: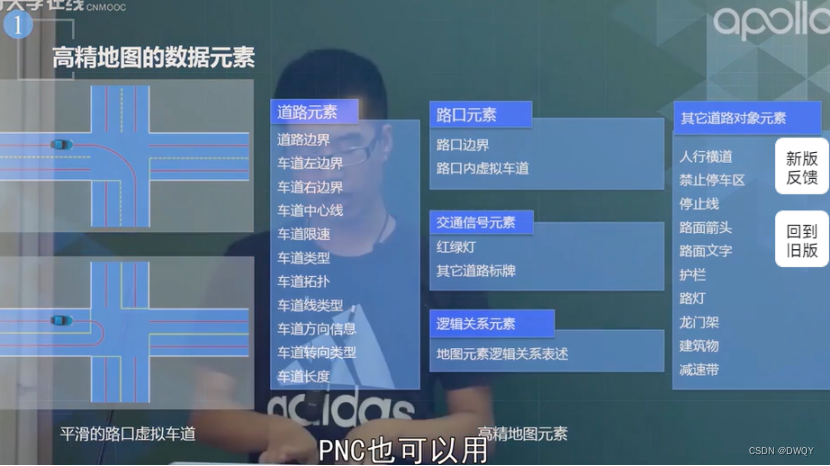
先规划,再控制
规划就是规划路径,预测轨迹 planning
自动驾驶操控过程:
决策规划问题:决策出的路径要进行平滑处理才能真正符合实际需求
可以通过动态规划来简化计算,但在动态场景下先验知识未必有效
对车处理时要把车当成刚体,而不能是质点去处理
无人车监测碰撞问题,无人车刚体是否有相交
阿波罗ROS改进的地方:
ROS存在的问题:数据传输有瓶颈、有roscore负责功能太多存在单点风险

通信性能优化:
1.共享内存解决数据拷贝问题(ROS中同一个数据,多个节点订阅,通过拷贝实现传送)


阿波罗平台的快速使用:
能够运行阿波罗的车有条件,有一点儿限制,符合阿波罗适配的硬件要求
阿波罗平台会帮助生成高精地图
阿波罗有专有的适配硬件
阿波罗针对于ROS做了工具集功能扩展
Apoll提供仿真平台:Azure 仿真平台不是在本地部署 可以得到仿真平台的报告
Apoll提供了一些开源数据集
个人感悟:之前只是听说过百度阿波罗,经过这次比较系统的了解,首先是让我对自动驾驶有了重新的认识。了解了自动驾驶中各个模块的所属功能,对如何学习各模块有了一个模糊的思路。再说回到阿波罗,我觉得百度干了一件了不起的事情,阿波罗的开源让开发者真正能够体会到自动驾驶的整个流程,而且有代码可以参照。阿波罗框架的一体化开发平台也降低了开发者的开发难度。乐观点儿说阿波罗想成为自动驾驶领域的安卓也可能会实现,让开发者成为自动驾驶的全栈工程师也可能实现。从各方面的消息看,百度已经卓有成效,与谷歌至少在同一水平battle,虽然自动驾驶的路还很长,但这些努力仍然可以帮助我们看到希望。
边栏推荐
- Do online usdt and usdc want to be short? Take you to find out | tokenview
- Obtain the home location through IP
- Microservices and microservice architecture
- 最新一代互联网:WEB 3.0
- US pressure surges, tiktok changes global safety director
- 巴西移动游戏代投出海机遇与挑战
- MCU如何选型?
- Deep learning 7 deep feedforward network
- Redis的发布和订阅
- SPARK中的FileSourceStrategy,DataSourceStrategy以及DataSourceV2Strategy
猜你喜欢
Classic general pbootcms flower website template source code, adaptive mobile terminal, with background management

ES6学习-函数(严格模式,高阶函数,闭包)

总结的太好了!终于有人把SQL的各种连接Join都讲明白了
Gateway new generation gateway

Openfeign service interface call
聊聊分布式锁
Talk about distributed locks

ansible自动化运维详解(四)ansible中playbook的编写使用、执行命令及实例演示

半透明双层玻璃侧厚
Excellent résumé! Enfin quelqu'un a compris toutes les connexions SQL
随机推荐
Snap 1669 combine deux notes de liste
全志V3s学习记录(13)OV2640的使用
3D laser slam:aloam --- interpretation of inter frame odometer code
5.1 security vulnerabilities and Prevention
图片浏览器
Softmax 回归 + 损失函数 + 图片分类数据集
把HBuilderX的主题变成vscode
Eureka自我保护
JS学习笔记06-08:数组的遍历以及数组的四个方法
关于快慢指针的理解
Ribbon load balancing service call
MySQL 2502 2503 error
数据库写入优化:分库分表及相关问题
TextView文字上下移动
Wvppro-zlm-gb21818-camera
深度学习之线性回归+基础优化
SCA在得物DevSecOps平台上应用
Obtain the home location through IP
Address monitoring API: how to trace and monitor uniswap hacker addresses
Classic general pbootcms flower website template source code, adaptive mobile terminal, with background management