当前位置:网站首页>基于simulink的转速反馈单闭环直流调速系统
基于simulink的转速反馈单闭环直流调速系统
2022-07-17 05:22:00 【我爱C编程】
目录
1.算法描述
仿真模型图为:


2.部分仿真图预览
①ode23 ②ode113


③ode15s ④ode23s


⑤ode23t ⑥ode23tb


①Kp=0.5
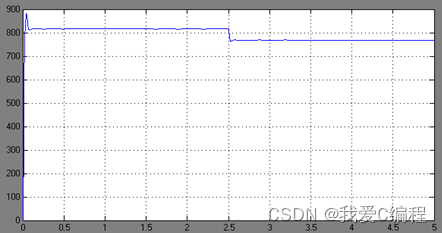
空载转速n=816r/min,稳态时转速n=768r/min,静差率s=5.88%
②Kp=1

空载转速n=948r/min,稳态时转速n=920r/min,静差率s=2.95%
③Kp=2

空载转速n=1030r/min,稳态时转速n=1016r/min,静差率s=1.36%
④Kp=4

空载转速n=1078r/min,稳态时转速n=1070r/min,静差率s=0.74%
⑤Kp=10

空载转速n=1110r/min,稳态时转速n=1105r/min,静差率s=0.45%
闭环反馈控制系统是按被调量的偏差进行控制的系统,只要被调量出现偏差,它就会自动产生纠正偏差的作用。而转速降落正是由负载引起的转速偏差,显然,闭环调速系统应该能大大减少转速降落。
(1)控制器为比例环节时
由实验波形可知,Kp值越大,稳定后的转速n就越大,超调量也越大,静差率s则越小。静差率s反映的是闭环反馈效果,s越小,闭环反馈效果则越好,即Kp值越大,闭环反馈效果则越好。在实际中,我们希望得到的是超调量小(即希望Kp小)和闭环反馈效果好(即希望Kp大)的系统,但是这二者却是相互矛盾的,我们只能从中选取一组最优平衡值,使得在较小超调量和较好反馈控制下系统能够最大限度的最好工作。
(2)控制器为比例积分环节时
超调量和响应时间受Kp、Ki共同控制,在相同Kp下,Ki越大,上升速度越快,响应时间越短,超调量越大;在相同Ki下, Kp越大,上升速度越快,响应时间越短,超调量越大。即Kp*Ki的值越大,上升速度越快,响应时间越短,但是超调量越大(Kp小于1时无超调量)。
静差率在仿真时间内为0,即实现了无静差调速系统。
当Kp取一定值时,Ki的值在增大到一定程度时,会产生振荡发散现象。
比较开环系统与闭环系统知,开环调速系统受到外界的干扰信号影响较闭环调速系统大;闭环系统的静差率比开环系统的小,且带比例放大器的反馈控制闭环调速系统是有静差的调速系统,而采用比例积分调节器的闭环调速系统则基本上实现了无静差调速,闭环反馈效果较好。
3.源码获取方式
获得方式1:
点击下载链接:
基于simulink的转速反馈单闭环直流调速系统+程序操作视频+word版说明文档
获取方式2:
博客资源项,搜索和博文同名资源。
获取方式3:
如果下载链接失效,加博主微信联系。
A_017
边栏推荐
猜你喜欢

Tcp/ip four layer model and related configurations of F5

剑指Offer刷题记录——Offer 07.重建二叉树

Review summary of MySQL

关于文件上传下载问题

Performance evaluation and comparison of lightweight application servers of major cloud service manufacturers, Alibaba cloud, Tencent cloud, Huawei cloud, and ucloud

Comparison between CS brand SD NAND and SPI NAND

【自动化测试】——robotframework实战(一)搭建环境
5G时代服务器在这里面起着什么作用?

解决sonar的单元测试的覆盖率会为0问题

Debug wechat one hop under linxu (Fedora 27)
随机推荐
Commande awk du troisième épéiste - - interception
Minecraft Paper 1.18.1 版开服教程,我的世界开服教程,MCSManager9面板使用教程
判断凹凸(数学题)
ACK攻击是什么意思?ACK攻击怎么防御
postgresql 数据库如何设置主键自增长
1.服务器是什么?
[automated testing] - robotframework practice (III) writing test cases
ANAME
Alibaba cloud Hangzhou arm ECS performance evaluation
配置树莓派3b+搭建个人网站
各大云服务厂商 轻量应用服务器 性能评测对比,阿里云、腾讯云、华为云、Ucloud
内网穿透服务器搭建教程,NPS使用教程
Application case of CS brand SD NAND in air quality inspection industry
小迪网络安全-笔记(2)
企业或个人域名备案怎么弄
Redraiment的遭遇
Homework
Galaxy Kirin server system building local and LAN Yum source
华为云 鲲鹏ARM云服务器 和 x86云服务器 性能评测对比
字典、元組和列錶的使用及區別,