当前位置:网站首页>毫米波雷达学习(五)——角度估计
毫米波雷达学习(五)——角度估计
2022-07-15 17:02:00 【不知何人】
系列文章目录
毫米波雷达学习(一)——范围估计
毫米波雷达学习(二)——IF信号相位
毫米波雷达学习(三)——速度估计
毫米波雷达学习(四)——系统设计讨论
毫米波雷达学习(五)——角度估计
简介
先前我们从距离和速度分析,这篇文章将从角度入手。所以雷达是前方有一个物体,它是如何估算这个角度呢?不同角度存在多个物体但是他们速度与距离相同,会怎样?雷达的可以观察的最大角度由什么决定?角分辨率又取决于什么?
角度估算
在先前测量相位变换的时候,微小的距离变化可以导致相位变化,角度估算也是类似的概念,需要至少两根RX天线,利用每根天线的差分距离。
相位变化:

角度估计:


由上图可以看出,额外距离=两个接收天线的距离 · sinθ(θ是到达角)
发射天线发射一个线性调频脉冲帧,每个天线接收数据,并处理该数据,创建一个2D-FFT矩阵,其中包含物体距离与速度的对应峰值。
讲了半天究竟该如何求到达角呢?
我们可以看到角度与w的不是线性关系,从sinθ函数的角度开始,我们都学过等价无穷小,知道sinθ的θ在接近0时可以等效为θ,而在接近90度的时候误差就非常大了。所以物体只有在雷达正前方也就是0度的时候角度估算才能达到最佳值,当然由于噪声,估算准确性会下降。
前面我们学过,由于速度的不模糊测量要求,也就是相位变化不小于180度,那么将180代入公式w值,即可推出θ的最大值。

雷达前方有两个物体
当雷达前方两个物体,且他们相对于雷达具有相同的距离和速度,那么这两个物体在2D-FFT相同的距离速度单元中。
这是他们的2D-FFT,其2D-FFT中有单个峰值,但是峰值处的信号将由两个向量叠加,这样先前的相位比较技术就无法使用了。

如何解决这个问题呢?我们将RX天线从两个增加到N个,他们的二维FFT将在同一个位置有一个峰值,这个系列峰值的信号将创建一个包含两个相位的离散信号,如图。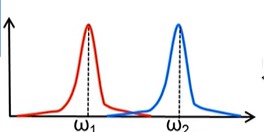
然后通过FFT读取这两个峰值的位置,反推出两个物体的到达角。

我会坚持学习并更新,非常感谢各位的观看。
边栏推荐
- Oscilloscope use concept record
- 08 semi automatic annotation of target detection data set
- PHP大量数据循环时内存耗尽问题的解决方案
- The characteristics and underlying principles of synchronized, as well as the state and expansion and upgrading process of locks
- *链表逆转
- 1-first knowledge of FPGA
- 枚举,你了解它吗?
- Win10右键新建栏目中添加新建Markdown文件(Typora.md)
- linq 实现查询字符串拼接 : And 和 OR 两种方式
- 【面试必刷101】哈希
猜你喜欢

非对称加密RSA与对称加密AES项目应用

compileflow 淘寶工作流引擎

The most important diagram of machine learning, how to select the model sklearn structure diagram

自增(自减)运算符的运算优先级

【使用Win10自带远程连接工具】远程访问并控制【另一台Win10电脑】

C language Chapter 8 array

8. MySQL -- 触发器

ERROR: THESE PACKAGES DO NOT MATCH THE HASHES FROM THE REQUIREMENTS FILE. If you have updated the
8. MySQL -- trigger

Ffmpeg sample analysis: muting c
随机推荐
Using the array of C to realize the addition, subtraction, multiplication and transpose of matrix
【森城市】GIS数据漫谈(四)— 坐标系统
什么是进制?
Type-C application OTG function while charging and transferring data (ldr6028s)
linq 实现查询字符串拼接 : And 和 OR 两种方式
How to save using OpenCV Mp4 format file
@Repository @[email protected] 注解的理解
select/poll/epoll的区别
初学者怎么快速学会SQL
Thumbnail image processing class library
Oscilloscope use concept record
Compileflow Taobao workflow engine
compileflow 淘寶工作流引擎
Yys connector with image recognition v2.0
Array and string assignment problem (not initialized when defining)
What is base?
MySQL autoincrement, index, foreign key, other operations
8. MySQL -- 触发器
Debug system
TP5 分页一些小点