当前位置:网站首页>Learning notes of automatic control principle --- linear discrete system
Learning notes of automatic control principle --- linear discrete system
2022-07-26 08:50:00 【Miracle Fan】
Study notes of automatic control principle
Self control principle learning notes column
Chapter one —— Dynamic model of feedback control system
Chapter two —— Stability analysis of control system
The third chapter —— Continuous time system performance analysis
Chapter four —— Calibration and synthesis of automatic control system
The fifth chapter —— Linear discrete system
Linear discrete system
List of articles
1. Discrete systems
Return directory
One or more signals in the system are pulse trains or digital systems
Types of discrete systems :
sampling system : Time is discrete , Numerical continuity , The continuous signal is sampled somewhere
digital system : Time is discrete , Numerical quantification
A/D The process
sampling : Discrete in time ,
quantitative : Numerically discrete
Ideal sampling process :
τ ≪ T \tau \ll T τ≪T, It is considered that the sampling is completed instantaneously
The word is long enough , Think e ∗ ( k T ) = e ( k T ) e^*(kT)=e(kT) e∗(kT)=e(kT)

D/A The process
ZOH Zero order holder , Keep the discrete signal every beat , Get a continuous signal

2. Signal sampling and holding
2.1 Signal sampling
1. Ideal sampling sequence
Because it's just n T nT nT Always valid , All direct use e ( n T ) e(nT) e(nT)
e ( n T ) e(nT) e(nT) Represents the value at the time of sampling , δ ( t − n T ) \delta(t-nT) δ(t−nT) It means the time is nT Effective at , It is only defined at the sampling point
δ T ( t ) = ∑ n = − ∞ ∞ δ ( t − n T ) e ∗ ( t ) = e ( t ) ⋅ δ T ( t ) = e ( t ) ⋅ ∑ n = 0 ∞ δ ( t − n T ) = ∑ n = 0 ∞ e ( n T ) ⋅ δ ( t − n T ) \begin{aligned} &\delta_T(t)=\sum^{\infty}_{n=-\infty}\delta(t-nT)\\ & e^*(t)=e(t)\cdot\delta_T(t)=e(t) \cdot \sum^{\infty}_{n=0}\delta(t-nT)=\sum^{\infty}_{n=0}e(nT)\cdot \delta(t-nT) \end{aligned} δT(t)=n=−∞∑∞δ(t−nT)e∗(t)=e(t)⋅δT(t)=e(t)⋅n=0∑∞δ(t−nT)=n=0∑∞e(nT)⋅δ(t−nT)

2.Laplace Transformation
L : E ∗ ( s ) = L [ e ∗ ( t ) ] = L [ ∑ n = 0 ∞ e ( n T ) ⋅ δ ( t − n T ) ] = ∑ n = 0 ∞ e ( n T ) ⋅ e − n T s \begin{aligned} L:E^*(s)&=L[e^*(t)]\\ &=L[\sum^{\infty}_{n=0}e(nT)\cdot\delta(t-nT)]=\sum^{\infty}_{n=0}e(nT)\cdot e^{-nTs} \end{aligned} L:E∗(s)=L[e∗(t)]=L[n=0∑∞e(nT)⋅δ(t−nT)]=n=0∑∞e(nT)⋅e−nTs
example : e ( t ) = 1 ( t ) , seek E ∗ ( s ) E ∗ ( s ) = ∑ n = 0 ∞ 1 ⋅ e − n T s = 1 + e − T s + e − 2 T s + ⋯ = 1 1 − e − T s = e T s e T s − 1 \begin{aligned} example :e(t) &=1(t), \text { seek } E^{*}(s) \\ E^{*}(s) &=\sum_{n=0}^{\infty} 1 \cdot e^{-n T s} \\ &=1+e^{-T s}+e^{-2 T s}+\cdots=\frac{1}{1-e^{-T s}}=\frac{e^{T s}}{e^{T s}-1} \end{aligned} example :e(t)E∗(s)=1(t), seek E∗(s)=n=0∑∞1⋅e−nTs=1+e−Ts+e−2Ts+⋯=1−e−Ts1=eTs−1eTs
give E ∗ ( s ) E^*(s) E∗(s) And e ( t ) e(t) e(t) The value relationship at the sampling point , Generally, it can be written in a closed form , Used to find e ∗ ( t ) e^*(t) e∗(t) Of z Transform or time domain response of the system
3. Fourier transform δ T ( t ) = ∑ n = − ∞ ∞ δ ( t − n T ) \delta_T(t)=\sum^{\infty}_{n=-\infty}\delta(t-nT) δT(t)=∑n=−∞∞δ(t−nT)
E ∗ ( s ) = 1 T ∑ − n = ∞ ∞ E ( s + j n w s E^*(s)=\frac{1}{T}\sum^{\infty}_{-n=\infty}E(s+jnw_s E∗(s)=T1∑−n=∞∞E(s+jnws), w s w_s ws sampling frequency
Generally, it cannot be written in a closed form , be used for e ∗ ( t ) e^*(t) e∗(t) Spectrum analysis
δ T ( t ) = ∑ n = ∞ ∞ c n e − j n ω s t d t ω s = 2 π / T c n = 1 T ∫ − T 2 T 2 δ T ( t ) ⋅ e − j n ω s t d t = 1 T ∫ 0 − 0 + δ ( t ) ⋅ 1 ⋅ d t = 1 T δ T ( t ) = 1 T ∑ n = ∞ ∞ e − j n ω s t d t e ∗ ( t ) = e ( t ) ⋅ δ T ( t ) = 1 T e ( t ) ∑ n = 0 ∞ e − j n ω s t = 1 T ∑ n = ∞ ∞ e ( t ) ⋅ e − j n ω s t L [ e ∗ ( t ) ] = L [ 1 T ∑ n = − ∞ ∞ e ( t ) ⋅ e − j n ω s t ] = 1 T ∑ n = − ∞ ∞ E ( s + j n w s ) \begin{aligned} \delta_{T}(t)=&\sum_{n=\infty}^{\infty} c_{n} \mathrm{e}^{-j n \omega_{s} t} d t \\ &\omega_{s}=2 \pi / T \\ &c_{n}=\frac{1}{T} \int_{-\frac{T}{2}}^{\frac{T}{2}} \delta_{T}(t) \cdot \mathrm{e}^{-j n \omega_s t} d t=\frac{1}{T} \int_{0^-}^{0^{+}} \delta(t) \cdot 1 \cdot d t=\frac{1}{T} \\ \delta_{T}(t)=&\frac{1}{T} \sum_{n=\infty}^{\infty} \mathrm{e}^{-j n \omega_s t} d t \\ e^{*}(t)=&e(t) \cdot \delta_{T}(t)=\frac{1}{T} e(t) \sum_{n=0}^{\infty} \mathrm{e}^{-j n \omega_s t}=\frac{1}{T} \sum_{n=\infty}^{\infty} e(t) \cdot \mathrm{e}^{-j n \omega_st} \\ L\left[e^{*}(t)\right]&=L\left[\frac{1}{T} \sum^{\infty}_{n=-\infty} e(t) \cdot \mathrm{e}^{-j n \omega_s t}\right]=\frac{1}{T}\sum^ \infty_{n=-\infty}E(s+jnw_s) \end{aligned} δT(t)=δT(t)=e∗(t)=L[e∗(t)]n=∞∑∞cne−jnωstdtωs=2π/Tcn=T1∫−2T2TδT(t)⋅e−jnωstdt=T1∫0−0+δ(t)⋅1⋅dt=T1T1n=∞∑∞e−jnωstdte(t)⋅δT(t)=T1e(t)n=0∑∞e−jnωst=T1n=∞∑∞e(t)⋅e−jnωst=L[T1n=−∞∑∞e(t)⋅e−jnωst]=T1n=−∞∑∞E(s+jnws)

2.2 Sampling theorem (Shannon)
The signal is completely reproduced Necessary condition
w s = 2 π T > 2 w h w_s=\frac{2\pi}{T}>2w_h ws=T2π>2wh, w s w_s ws Is the sampling frequency , w h w_h wh Is the maximum width of the spectrum
spectrum - The signal is decomposed by frequency
Frequency characteristics for the system , Spectrum for signals

2.3 Zero order holder ZOH
Adding a zero order holder can be seen as adding a T s 2 \frac{Ts}{2} 2Ts Pure delay link


3. Z Transformation
3.1 Definition
For sampled signals Laplace Transformation , Make z − 1 = e − T s z^{-1}={e}^{-T s} z−1=e−Tsd
E ( z ) = Z [ e ∗ ( t ) ] = E ∗ ( s ) z = e T s = ∑ n = 0 ∞ e ( n T ) ⋅ z − n E(z)=Z\left[e^{*}(t)\right]=E^{*}(s){ }_{z=e^{Ts}}=\sum_{n=0}^{\infty} e(nT) \cdot z^{-n} E(z)=Z[e∗(t)]=E∗(s)z=eTs=n=0∑∞e(nT)⋅z−n
{ e ∗ ( t ) = ∑ n = 0 ∞ e ( n T ) ⋅ δ ( t − n T ) E ∗ ( s ) = ∑ n = 0 ∞ e ( n T ) ⋅ e − n T s E ( z ) = ∑ n = 0 ∞ e ( n T ) ⋅ z − n \left\{\begin{array}{l} e^{*}(t)=\sum_{n=0}^{\infty} e(n T) \cdot \delta(t-n T) \\ E^{*}(s)=\sum_{n=0}^{\infty} e(n T) \cdot \mathrm{e}^{-n T s} \\ E(z)=\sum_{n=0}^{\infty} e(n T) \cdot \mathrm{z}^{\mathrm{-n}} \end{array}\right. ⎩⎨⎧e∗(t)=∑n=0∞e(nT)⋅δ(t−nT)E∗(s)=∑n=0∞e(nT)⋅e−nTsE(z)=∑n=0∞e(nT)⋅z−n
E(z) Only corresponding to unique e ∗ ( t ) e^*(t) e∗(t), It doesn't correspond to the only e ( t ) e(t) e(t)
z Transformation is only for discrete signals
3.2 Z Change the way
- Summation of series
Definition :
E ( z ) = ∑ n = 0 ∞ e ( n T ) ⋅ z − n E(z)=\sum^\infty_{n=0}e(nT)\cdot z^{-n} E(z)=n=0∑∞e(nT)⋅z−n
Use the method of definition to find E ( z ) E(z) E(z), Using the method of series
Partial fraction method
Residue method
E ( z ) = ∑ i = 1 l [ Res E ( s ) z z − e T s ] s = s i E(z)=\sum_{i=1}^{l}\left[\operatorname{Res} E(s) \frac{z}{z-e^{T s}}\right]_{s =s_{i}} E(z)=i=1∑l[ResE(s)z−eTsz]s=si
3.3 Z Basic theorem of transformation
Reset shift theorem :
Z [ e ( t ) ⋅ e ∓ a t ] = E ( z ⋅ e ± a T ) Z[e(t)\cdot e^{\mp at}]=E(z\cdot e^{\pm aT}) Z[e(t)⋅e∓at]=E(z⋅e±aT)
The initial value theorem :
lim n → 0 e ( n T ) = lim z → ∞ E ( z ) \lim_{n\rightarrow0}e(nT)=\lim_{z\rightarrow\infty}E(z) n→0lime(nT)=z→∞limE(z)
The final value theorem :
lim n → ∞ e ( n T ) = lim z → 1 ( z − 1 ) ⋅ E ( z ) \lim_{n\rightarrow\infty}e(nT)=\lim_{z\rightarrow1}(z-1)\cdot E(z) n→∞lime(nT)=z→1lim(z−1)⋅E(z)
4.Z Reverse transformation
4.1 Long division
Will be closed form z Field expression , Expand into series . Then the expression in time domain is obtained by transformation

4.2 Partial fraction expansion
Note that after expansion, there is a continuous time-domain signal , It is necessary to sample again to get the sampled discrete signal .

4.3 Residue method
e ( n T ) = ∑ R e s [ E ( z ) ⋅ z n − 1 ] e(nT)=\sum Res[E(z)\cdot z^{n-1}] e(nT)=∑Res[E(z)⋅zn−1]


5. The difference equation
Return directory
Forward difference :
Δ f ( k ) = f ( k + 1 ) − f ( k ) Δ 2 f ( k ) = Δ f ( k + 1 ) − Δ f ( k ) = f ( k + 2 ) − 2 f ( k + 1 ) + f ( k ) Δ 3 f ( k ) = Δ 2 f ( k + 1 ) − Δ 2 f ( k ) = f ( k + 3 ) − 3 f ( k + 2 ) + 3 f ( k + 1 ) − f ( k ) Δ n f ( k ) = f ( k + n ) − n f ( k + n − 1 ) + … + ( − 1 ) n − 1 n f ( k + 1 ) + ( − 1 ) n f ( k ) \begin{array}{l} \Delta f(k)=f(k+1)-f(k)\\ \Delta^{2} f(k)=\Delta f(k+1)-\Delta f(k)=f(k+2)-2 f(k+1)+f(k) \\ \Delta^{3} f(k)=\Delta^{2} f(k+1)-\Delta^{2} f(k)=f(k+3)-3 f(k+2)+3 f(k+1)-f(k) \\ \Delta^{n} f(k)=f(k+n)-n f(k+n-1)+\ldots+(-1)^{n-1} n f(k+1)+(-1)^{n} f(k) \end{array} Δf(k)=f(k+1)−f(k)Δ2f(k)=Δf(k+1)−Δf(k)=f(k+2)−2f(k+1)+f(k)Δ3f(k)=Δ2f(k+1)−Δ2f(k)=f(k+3)−3f(k+2)+3f(k+1)−f(k)Δnf(k)=f(k+n)−nf(k+n−1)+…+(−1)n−1nf(k+1)+(−1)nf(k)
Backward difference :
∇ f ( k ) = f ( k ) − f ( k − 1 ) ∇ 2 f ( k ) = ∇ f ( k ) − ∇ f ( k − 1 ) = f ( k ) − 2 f ( k − 1 ) + f ( k − 2 ) ∇ 3 f ( k ) = ∇ 2 f ( k ) − ∇ 2 f ( k − 1 ) = f ( k ) − 3 f ( k − 1 ) + 3 f ( k − 2 ) − f ( k − 3 ) ∇ n f ( k ) = ∇ n − 1 f ( k ) − ∇ n − 1 f ( k − 1 ) \begin{array}{l} \nabla f(k)=f(k)-f(k-1)\\ \nabla^{2} f(k)=\nabla f(k)-\nabla f(k-1)=f(k)-2 f(k-1)+f(k-2) \\ \nabla^{3} f(k)=\nabla^{2} f(k)-\nabla^{2} f(k-1)=f(k)-3 f(k-1)+3 f(k-2)-f(k-3) \\ \nabla^{n} f(k)=\nabla^{n-1} f(k)-\nabla^{n-1} f(k-1) \end{array} ∇f(k)=f(k)−f(k−1)∇2f(k)=∇f(k)−∇f(k−1)=f(k)−2f(k−1)+f(k−2)∇3f(k)=∇2f(k)−∇2f(k−1)=f(k)−3f(k−1)+3f(k−2)−f(k−3)∇nf(k)=∇n−1f(k)−∇n−1f(k−1)
5.1 Iterative method
Will be continuous domain name e ˙ ( t ) \dot{e}(t) e˙(t) In discrete fields e ( k + 1 ) − e ( k ) e(k+1)-e(k) e(k+1)−e(k) Instead of

5.2 z Transformation method

6. Pulse transfer function
Return directory
Definition : Output of discrete system under zero initial condition z Transform pair input z Transformation ratio .
Unit impulse response function z Transformation
It is only applicable to linear time invariant discrete systems
G ( z ) = C ( z ) R ( z ) G(z)=\frac{C(z)}{R(z)} G(z)=R(z)C(z)
Convolution formula : c ( k ) = ∑ i = 0 ∞ g ( k − i ) ⋅ r ( i ) C ( z ) ∑ k = 0 ∞ [ c ( k ) ⋅ z − k ] = ∑ k = 0 ∞ [ ( ∑ i = 0 ∞ g ( k − i ) ⋅ r ( i ) ) ⋅ z − k ] = m = k − i ∑ m = 0 ∞ [ ( ∑ i = 0 ∞ g ( m ) ⋅ r ( i ) ) ⋅ z − ( m + i ) ] = ∑ m = 0 ∞ g ( m ) z − m ∑ i = 0 ∞ r ( i ) z − i = G ( z ) ⋅ R ( z ) G ( z ) = ∑ k = 0 ∞ g ( k ) z − k = C ( z ) R ( z ) \begin{aligned} \mathsf{\text { Convolution formula :}} &c(k)=\sum_{i=0}^{\infty} g(k-i) \cdot r(i)\\ &C(z) \sum_{k=0}^{\infty}\left[c(k) \cdot z^{-k}\right]=\sum_{k=0}^{\infty}\left[\left(\sum_{i=0}^{\infty} g(k-i) \cdot r(i)\right) \cdot z^{-k}\right]\\ &\overset{m=k-i}=\sum_{m=0}^{\infty}\left[\left(\sum_{i=0}^{\infty} g(m) \cdot r(i)\right) \cdot z^{-(m+i)}\right]=\sum_{m=0}^{\infty} g(m) z^{-m} \sum_{i=0}^{\infty} r(i) z^{-i}\\ &=G(z) \cdot R(z)\\ G(z)=&\sum_{k=0}^{\infty} g(k) z^{-k}=\frac{C(z)}{R(z)} \end{aligned} Convolution formula :G(z)=c(k)=i=0∑∞g(k−i)⋅r(i)C(z)k=0∑∞[c(k)⋅z−k]=k=0∑∞[(i=0∑∞g(k−i)⋅r(i))⋅z−k]=m=k−im=0∑∞[(i=0∑∞g(m)⋅r(i))⋅z−(m+i)]=m=0∑∞g(m)z−mi=0∑∞r(i)z−i=G(z)⋅R(z)k=0∑∞g(k)z−k=R(z)C(z)
6.1 Serial links
Including sampling switch , O, respectively, z Transform and multiply . No sampling switch , Multiply before z Transformation

6.2 ZOH

G ( z ) = Z ( 1 − e − s T s G p ( s ) ) = ( 1 − z − 1 ) Z ( G p ( s ) s ) G(z)=Z\left(\frac{1-\mathrm{e}^{-s T}}{s} G_{\mathrm{p}}(s)\right)=\left(1-z^{-1}\right) Z\left(\frac{G_{\mathrm{p}}(s)}{s}\right) G(z)=Z(s1−e−sTGp(s))=(1−z−1)Z(sGp(s))
Find the closed-loop transfer function
Generally, when the sampling switch is placed at the deviation , The closed-loop transfer function can be obtained in the following way .
Φ ( z ) = C ( z ) R ( z ) = G ( z ) G ( z ) H ( z ) \Phi(z)=\frac{C(z)}{R(z)}=\frac{G(z)}{G(z)H(z)} Φ(z)=R(z)C(z)=G(z)H(z)G(z)


plus: It works Mason The condition of the formula

7. Stability analysis of discrete systems
7.1 Based on bilinear transformation ROUTH The criterion
Make z = w + 1 w − 1 z=\frac{w+1}{w-1} z=w−1w+1 Equivalent transformation of characteristic polynomial of closed-loop system , And then use it w Domain Routh Criterion to judge stability .P352

7.2JURY The criterion
Directly according to the coefficients of the closed-loop characteristic equation of the discrete system , Determine whether its root is located in the unit circle on the plane , So as to judge whether it is stable .
List Jury step :
- The first row of coefficients is the coefficients of the characteristic equation
- Even row coefficients are the reverse order of odd row coefficients
- The calculation formula of other odd rows is as follows :



8. Digital correction of discrete systems
Return directory
For design The controller also needs to satisfy the constraints :
- C ( z ) C(z) C(z) It is stable. : The pole of the controller is in the unit circle or the pole is 1
- The controller is causal , Each item constituting the controller is the current or past data
The design method of the controller :
- First design continuous controller , Then discretize the controller
- Analytical design method , The design of minimum beat system is the most typical
- Direct design method , It's based on z The root locus method of the plane is based on w Frequency domain method of plane
8.1 Typical continuous domain discretization method
The basic idea : The frequency characteristics of digital controller and analog controller are equivalent , take s The controller of the domain is transformed into z Domain , First design the model controller , And then discretize it , The response of discrete system is not consistent with that of continuous system .
- First order difference method : Forward difference Obtained controller The stability of the controller itself cannot be guaranteed , and Backward difference Discrete controller It can maintain its stability
- Impulse response method : There is no serial discretization method
- Step response invariant method
- Pole zero matching
- bilinear transformation
8.2 discretization PID correction
- Integral separates numbers PID: First use PD…… still Will consider whether to add points link
- Incomplete differential number PID: Differential action is easy to cause high-frequency disturbance , In the typical PID Add a low pass filter ( First order inertial link ) To suppress high-frequency disturbances
- Differential antecedent number PID: In order to avoid the impact on the control system caused by the rise and fall of the given value , Only the output feedback is differentiated , Don't give differential
- Variable speed integral PID: Good continuity of integral separation , It's steady
- Bang-Bang PID: Choose according to the deviation , When The deviation is greater than the threshold , use Bang-Bang control , When the deviation is less than the threshold , use PID
- With dead band PID: in order to Prevent frequent action of mechanism , You can add a link with dead zone
8.3 Smith Pure lag compensation PID
The controlled object contains Pure hysteresis Often Cause overshooting and sustained oscillation , It will reduce the stability of the system , In serious cases, it may lose stability . Design PID The controller is not designed separately .
8.4Dahlin Algorithm :
Expected closed-loop transfer function : Equal to the pure lag time of the object
constraint : Overshoot
Target : First order with pure delay 、 Second order inertia link ( Linear systems )
Eliminate ringing : leave z=-1 The farther , The weaker the ringing phenomenon , You need to keep the static gain constant .
9. Minimum beat system

Minimum beat system : Under the action of typical input , Can be in The response process ends in a finite beat and there is no steady-state error at the sampling point .
- The impulse response of a system ends in the smallest finite beat , It means that the stability of the system is infinite .
- The designed controller must be stable or contain integral
The closed-loop transfer function of time invariant discrete systems is required to include a delay factor : The delay factor is set according to the requirement that the controller cannot contain a lead factor , One of the sources of this delay factor is that the controlled object contains a pure lag link , One of the delay factors is adopted by the object ZOH Introduced after discretization P376
Ripple and no ripple :
* Ripple :* The steady-state error at the sampling point is 0
* ripple-free :* The steady-state error between the sampling point and the sampling point is 0
Ripple system is a minimum beat controller designed for a typical input, which makes the output response transient process achieve error free after finite beats at the sampling time point
All ripples in a ripple system are mainly caused by the controller output not being synchronized with the output to achieve stability within a finite beat
The output response of the ripple free system is synchronized with the controller output to achieve stability
Design steps of ripple and ripple free system :
According to the typical input signal z The number of transformation integrals is determined m
Typical signal m 1(t) 1 t 2 t 2 / 2 t^2/2 t2/2 3 Determine the number of delayed beats according to the controlled object h( Include ZOH Introduced 1 Beat lag and the inherent pure lag of the source object -> see 1 1 − z − 1 \frac{1}{1-z^{-1}} 1−z−11 The number of times ); Number of unstable poles p, Number of zeros q(q Is the unit outside the circle 、 Up zero — For ripple ,r For all zeros — For ripple free )
The above coefficient can be determined by m+p Solve the equation P377
Φ ( z ) = z − h ∏ i = 1 q ( r ) ( 1 − β i z − 1 ) ( φ 0 + φ 1 z − 1 + ⋯ + φ m + p − 1 z − ( m + p − 1 ) ) \Phi(z)=z^{-h} \prod_{i=1}^{q(r)}\left(1-\beta_{i} z^{-1}\right)\left(\varphi_{0}+\varphi_{1} z^{-1}+\cdots+\varphi_{m+p-1} z^{-(m+p-1)}\right) Φ(z)=z−hi=1∏q(r)(1−βiz−1)(φ0+φ1z−1+⋯+φm+p−1z−(m+p−1))
1 − Φ ( z ) = ( 1 − z − 1 ) m ∏ i = 1 p ( 1 − α i z − 1 ) ( 1 + f 1 z − 1 + ⋯ + f h + q ( r ) − 1 z − ( h + q ( r ) − 1 ) ) 1-\Phi(z)=\left(1-z^{-1}\right)^{m} \prod_{i=1}^{p}\left(1-\alpha_{i} z^{-1}\right)\left(1+f_{1} z^{-1}+\cdots+f_{h+q(r)-1} z^{-(h+q(r)-1)}\right) 1−Φ(z)=(1−z−1)mi=1∏p(1−αiz−1)(1+f1z−1+⋯+fh+q(r)−1z−(h+q(r)−1))
Solve the required equation :
Φ ( z ) ∣ z = 1 = 1 , Φ ′ ( z ) ∣ z = 1 = 0 , Φ ′ ′ ( z ) ∣ z = 1 = 0 , Φ ′ ′ ′ ( z ) ∣ z = 1 = 0 , ⋯ , Φ ( m − 1 ) ( z ) ∣ z = 1 = 0 Φ ( z ) ∣ z = α 1 = 1 , Φ ( z ) ∣ z = α 2 = 1 , Φ ( z ) ∣ z = α 3 = 1 , Φ ( z ) ∣ z = α 4 = 1 , ⋯ , Φ ( z ) ∣ z = α p = 1 \begin{array}{l} \left.\Phi(z)\right|_{z=1}=1,\left.\Phi^{\prime}(z)\right|_{z=1}=0,\left.\Phi^{\prime \prime}(z)\right|_{z=1}=0,\left.\Phi^{\prime \prime \prime}(z)\right|_{z=1}=0, \cdots,\left.\Phi^{(m-1)}(z)\right|_{z=1}=0 \\ \left.\Phi(z)\right|_{z=\alpha_{1}}=1,\left.\Phi(z)\right|_{z=\alpha_{2}}=1,\left.\Phi(z)\right|_{z=\alpha_{3}}=1,\left.\Phi(z)\right|_{z=\alpha_{4}}=1, \cdots,\left.\Phi(z)\right|_{z=\alpha_{p}}=1 \end{array} Φ(z)∣z=1=1,Φ′(z)∣z=1=0,Φ′′(z)∣z=1=0,Φ′′′(z)∣z=1=0,⋯,Φ(m−1)(z)∣∣z=1=0Φ(z)∣z=α1=1,Φ(z)∣z=α2=1,Φ(z)∣z=α3=1,Φ(z)∣z=α4=1,⋯,Φ(z)∣z=αp=1
Control system adjustment time estimation :
t s ≤ ( h + p + q ( r ) + m − 1 ) t_s\le(h+p+q(r)+m-1) ts≤(h+p+q(r)+m−1)
边栏推荐
- pl/sql之集合-2
- Set of pl/sql -2
- 1、 Redis data structure
- Web3 Games: current situation and future
- KV database based on raft consensus protocol
- Web概述和B/S架构
- Maximum common substring & regularity problem
- Arbitrum Nova release! Create a low-cost and high-speed dedicated chain in the game social field
- Mysql8 dual master and dual slave +mycat2 read / write separation
- My meeting of OA project (query)
猜你喜欢
![[encryption weekly] has the encryption market recovered? The cold winter still hasn't thawed out. Take stock of the major events that occurred in the encryption market last week](/img/d8/a367c26b51d9dbaf53bf4fe2a13917.png)
[encryption weekly] has the encryption market recovered? The cold winter still hasn't thawed out. Take stock of the major events that occurred in the encryption market last week

Media at home and abroad publicize that we should strictly grasp the content

C#入门系列(三十一) -- 运算符重载
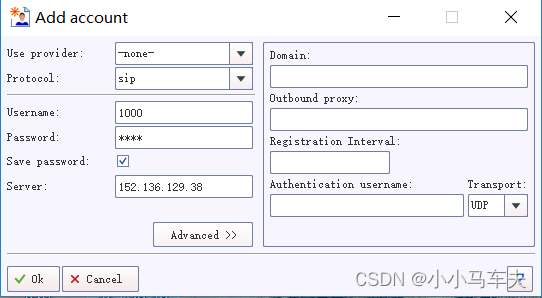
【FreeSwitch开发实践】使用SIP客户端Yate连接FreeSwitch进行VoIP通话

Kotlin属性与字段
Registration of finite element learning knowledge points
![[search topics] flood coverage of search questions after reading the inevitable meeting](/img/54/ce672d21a4a67110ee629dde3cb9dc.png)
[search topics] flood coverage of search questions after reading the inevitable meeting

Sub Chocolate & paint area

Mysql8 dual master and dual slave +mycat2 read / write separation

Cadence(十)走线技巧与注意事项
随机推荐
基于C语言实现的人机交互软件
Dynamic SQL and exceptions of pl/sql
23.6 23.7 web environment web environment variable reading
Spark SQL common date functions
Analysis on the query method and efficiency of Oracle about date type
[recommended collection] summary of MySQL 30000 word essence - partitions, tables, databases and master-slave replication (V)
P3743 kotori的设备
Maximum common substring & regularity problem
pl/sql之集合
P3743 Kotori's equipment
Please tell me if there is any way to increase the write out rate when the Flink SQL client is in the sink table. When synchronizing through sink table
Oracle 19C OCP 1z0-082 certification examination question bank (36-41)
Study notes of automatic control principle --- stability analysis of control system
[recommended collection] MySQL 30000 word essence summary index (II) [easy to understand]
【搜索专题】看完必会的搜索问题之洪水覆盖
Spark persistence strategy_ Cache optimization
基于C语言的哈夫曼转化软件
Solve the problem of C # calling form controls across threads
Oracle 19C OCP 1z0-083 question bank (7-12)
Cve-2021-21975 VMware SSRF vulnerability recurrence