Double pendulum simulator using a symplectic Euler's method. The program calculates the momentum and position of each ball using Hamiltonian formulations, and uses those calculations to adjust the pendulum's course. This provides a double pendulum that stays stable and more analagous to real-life for longer periods of time, without the need of more complex math/animation modules. Mathematical methods provided in attatched PDF.
- Visualization UI that shows scaled changes in pendulum lengths, masses, and starting angles
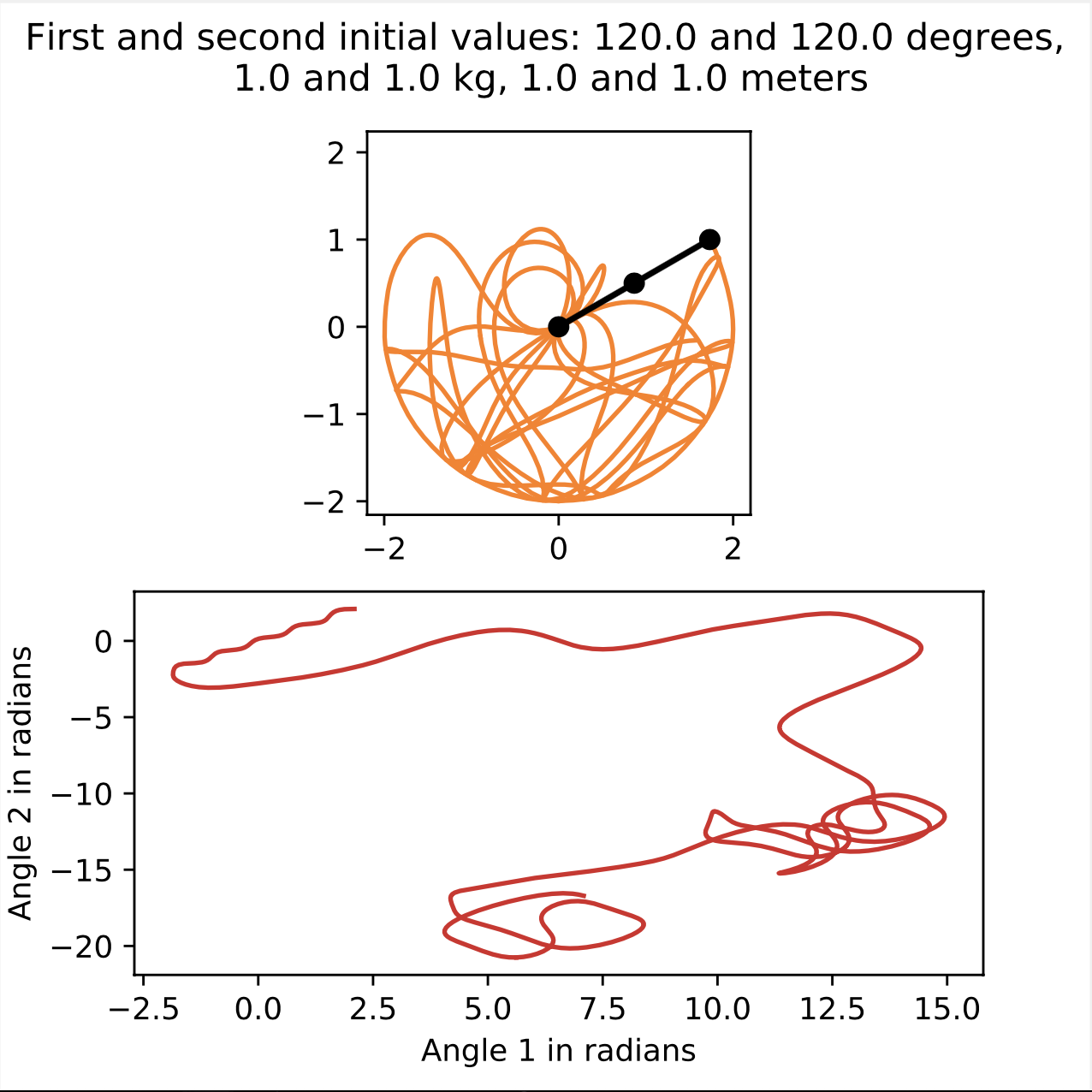
- Generates EPS plot of path and phase diagram on command
- Built to run on a Rasberry Pi/Linux based system
Run ./doublependulum.py in Linux terminal.
If pendulum animation becomes unstable, the momenta of the masses are most likely too large for the allowed framerate of matplotlib. Try lowering masses or lengthening pendulums.
- numpy
- matplotlib
- threading
- time
Scott Marino / scottmarino@icloud.com