当前位置:网站首页>A trick to teach you to easily understand Potter's map
A trick to teach you to easily understand Potter's map
2022-07-26 05:28:00 【Uncle wheat】
Click on the above “ Uncle wheat ”, choice “ Roof placement / Official account of star standard ”
Welfare dry goods , First time delivery
Bode Plots Its main function is to express the frequency characteristics of the system , Including amplitude frequency characteristics and phase frequency characteristics . Suppose there is a system for following sine waves , When inputting a sine wave , The output is also a sine wave , But input 、 The output will vary in amplitude and phase , In the time domain, as shown in the figure below .

It can be seen from the above figure that the amplitude gain of the system at a certain frequency is 20lg(1.4/2.0)=-3.1dB, phase shift ( Lag angle ) by -45°( Negative numbers indicate lag ). When the input frequency is different , Amplitude gain and phase shift will also change , Obviously, it is difficult to express the output of the system at different frequencies in the time domain , Baud diagram is introduced here , It is used to express the characteristics of the system at different frequencies , That is, the proportion of amplitude change and the degree of phase shift . Define the abscissa of the Bode diagram as frequency , The ordinate is the gain and phase shift and is expressed in logarithmic form ( Logarithm can magnify coordinates ). We change the frequency of the input signal , And measure the amplitude and phase shift of the output signal at different frequencies , And calculate the coordinate conversion , The following open-loop and closed-loop bode diagrams of an ideal motor can be drawn .

The Bode diagram of the ideal motor in the figure above is divided into two curves, open-loop and closed-loop , Closed loop system means that the output signal is fed back to the input to participate in the control , Different information can be read from the two curves . Through the amplitude frequency curve and phase frequency curve of the open-loop system, the amplitude margin and phase margin of the system can be obtained to judge the stability of the system . It is specified that when a certain frequency signal is input, the amplitude gain is 0dB when , Phase shift angle of output at this frequency +180° Is the phase margin of the open-loop system . The phase margin of the system shown in the figure below is 180°+(-147°)=33°. Specify when a certain frequency signal is input , The output phase shift of the system is -180°( Output flip ) when , Its output amplitude gain is the gain margin of the system ( Amplitude margin ), The amplitude margin of the system in the figure below is 0-32.5dB=32.5dB
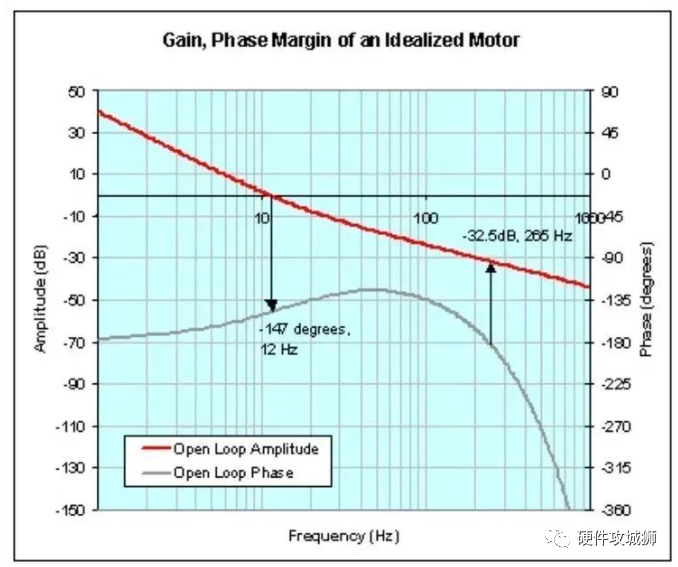
The amplitude margin of the above system is 32.5dB, The phase margin is 33dB, System stability . In order to ensure the stability of the system under closed-loop control , Generally, the phase margin of the system is greater than 45°. When the amplitude margin of the system is 0, The phase margin is 0 There will be self-excited oscillation , It is an unstable system in control . The following analysis shows that the gain is 0dB, The phase shift is -180° The characteristics of the system . As shown in the figure below PID Control system , When the open-loop gain of the system at a certain frequency is 0dB, The open-loop phase shift is -180°, Feedback is introduced to form a closed-loop control .PID Control input ERR=INPUT-OUTPUT, The open-loop output phase shift of the system is -180°, Because the calculated error value will double , It forms a positive feedback system , The system is unstable .

In tune PID Parameter time , The step response of the system under different parameters is shown in the figure below , It can be divided into underdamped 、 Overdamping 、 Critical damping system .

Underdamped 、 Overdamping 、 The Bode diagram of the critical damping system is shown in the figure below .

in addition , According to the baud diagram of the system, the control system can also be corrected , This is the greatest use of Bottu .
From the public number : Hardware siege lion
Copyright notice : Source network of this paper , The copyright belongs to the original author . Copyright issues , Please contact to delete .
Previous recommendation
I also found excellent software and hardware projects , All open source
do{} while(0) It's meaningless to execute only once ? You may not really understand
I'll show you a way to get it done , SCM development commonly used state machine
This open source project is really awesome , Introduce a high-power servo driver
Hardware , It is difficult to ?
边栏推荐
- Okaleido launched the fusion mining mode, which is the only way for Oka to verify the current output
- 使用Ansible中的playbook
- Week 6 Learning Representation: Word Embedding (symbolic →numeric)
- Go exceed API source code reading (VI) -- deletesheet (sheet string)
- STL常用模板库
- DOM操作--操作节点
- Knowledge points of Polymer Physics
- Okaleido上线聚变Mining模式,OKA通证当下产出的唯一方式
- Earth system model (cesm) practical technology
- Ansible中常用的模块
猜你喜欢

C language - Advanced pointer

Redis 官方可视化工具,高颜值,功能真心强大!

Attack and defense world flatscience

SSTI payload and various bypass methods

Getaverse,走向Web3的远方桥梁

Trend of the times - the rise of cloud native databases

Okaleido上线聚变Mining模式,OKA通证当下产出的唯一方式
FTP实验及概述

Basic methods of realizing licensing function in C language

Shell read read console input, use of read
随机推荐
【STM32系列汇总】博主的STM32实战快速进阶之路(持续更新)
IVR在voip电话系统的应用与价值
虚拟偶像代言产品出问题谁负责? 且听律师分析
Unity scene jump script
jupyter notebook快捷键
SSTI payload and various bypass methods
87. Disturb string
CLM land surface process model
Home VR panoramic display production to improve customer transformation
Hack the box - Web requests module detailed Chinese tutorial
Shell read read console input, use of read
Mongodb common commands
Use playbook in ansible
测试必备工具之Fiddler,你真的了解吗?
我又发现了超赞的软硬件项目,全部开源
No background, no education? Is it really hopeless for specialist testers to enter Internet factories?
nn.Moudle模块-创建神经网络结构需要注意的细节
又一开源神器,值得收藏学习!
Getaverse,走向Web3的远方桥梁
Earth system model (cesm) practical technology