当前位置:网站首页>【论文阅读|深读】GraLSP: Graph Neural Networks with Local Structural Patterns
【论文阅读|深读】GraLSP: Graph Neural Networks with Local Structural Patterns
2022-07-15 21:34:00 【海轰Pro】

前言
Hello!
非常感谢您阅读海轰的文章,倘若文中有错误的地方,欢迎您指出~
自我介绍 ଘ(੭ˊᵕˋ)੭
昵称:海轰
标签:程序猿|C++选手|学生
简介:因C语言结识编程,随后转入计算机专业,获得过国家奖学金,有幸在竞赛中拿过一些国奖、省奖…已保研。
学习经验:扎实基础 + 多做笔记 + 多敲代码 + 多思考 + 学好英语!
唯有努力
知其然 知其所以然!
本文仅记录自己感兴趣的内容
简介
原文链接:https://ojs.aaai.org//index.php/AAAI/article/view/5861
会议:AAAI 2020(CCF A类)
代码:https://github.com/KL4805/GRALSP
年度:2020/04/03
Abstract
直到最近,图神经网络(GNN)才被用来进行图表示学习,其中基于节点邻域内特征聚集的图表示学习取得了很大的成功
然而,尽管取得了这样的成就,GNN在确定一些常见的结构模式方面存在缺陷,不幸的是,这些模式在各种网络现象中发挥着重要作用
在本文中,我们提出了GraLSP,这是一个GNN框架,它通过随机匿名遍历将局部结构模式显式地结合到邻域聚集中
- 具体地说,我们通过随机匿名遍历捕获局部图结构,这是一种表示结构模式的强大而灵活的工具
- 然后将步态反馈到特征聚合中,在特征聚合中设计各种机制来应对结构特征的影响,包括自适应接受半径、注意力和放大
- 此外,我们设计的目标可以捕捉结构之间的相似性,并与节点邻近性目标一起进行优化
在充分利用结构模式的情况下,我们的模型能够在多个数据集中的各种预测任务中超越竞争对手
1 Introduction
图 因其对关系数据的准确描述 而无处不在
图表示学习(Cui et al.2018),为了缓解图的稀疏性和不规则性,出现了将节点投影到向量空间,同时保持图的性质的方法
向量空间是规则的
因此,图表示学习是一种通用的工具,可以适应图上的大量预测任务
最近,将深度学习扩展到图的成功带来了图神经网络(GNN)(周等人。2018),并取得了令人印象深刻的表现
许多GNN遵循一种称为邻域聚合的递归方案,其中节点的表示向量是通过聚合和变换其邻域内的特征来计算的
通过这样做,构建了以自下而上的方式计算的计算树
基于邻域聚合的GNNs1以其强大而高效的特性吸引了众多研究工作的关注(Xu et al.2018年;刘等人。2019年)。
除了GNN聚集的节点级特征外,图形中也普遍存在其他尺度的特征,其中频繁出现的不同尺度的结构模式是典型的,表明节点和图形的属性
例如分子网络中的功能(PrˇZulj2007)、信息流模式(Granovetter(1977)、ParanJapan(2017))和社会现象(Kovanen等人)。2013)
这些通常是节点级功能无法提供的全局洞察。
然而,尽管GNN确实对节点的邻域进行编码(Xu等人)。2018),它们不能确保为具有不同结构模式的节点生成不同的结果
具体地说,局部结构模式之间的区别很小,例如一个或两个链接,这使得GNN很难为结构模式生成独特的嵌入,即使具有非常不同的语义
我们以社交网络中具有强联系特征的三元闭包模式为例(Huang et al.2015年)
我们在图1中显示了两层GNN中的三元闭包的计算树
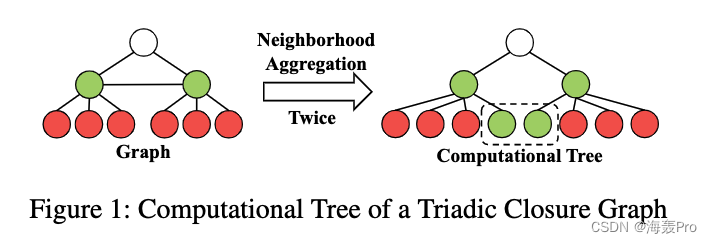
可以看出,三元闭包的唯一不同之处在于树的第二层上存在一阶邻居(绿色节点),其影响随着它们的邻域(红色节点)的扩展而减小
因此,基于邻域聚集,GNN在某些情况下可能无法为拓扑相似但语义截然不同的结构模式生成独特的嵌入
作为图像中CNN的对应物,我们认为GNN能够捕获不同级别和尺度的图形特征,包括节点和局部结构级别
因此,出现了一个问题:我们如何使GNN能够更充分地捕捉和利用多尺度的结构和节点特征?
一种简单的方法是首先测量每个节点的结构属性,然后将它们与它们的节点特征连接起来作为输入
然而,尽管这很容易,但仍有两个挑战有待解决。
- Efficiency:测量结构模式的大多数度量都需要枚举和模式匹配,这通常需要非常高的复杂性
- 例如,作为一种广泛采用的度量,计算k-−统计量的时间复杂度为O(|V|dk Graphlet 1)(Shervashze等人)。2009)在图表中
- Incorporation of structural properties:挑战还在于将这些资产纳入其中。一方面,结构特征传达了丰富的语义,这些语义揭示了图的属性,而这些属性不能仅通过统计来捕获。另一方面,结构属性可以指示图中节点的角色,从而指导特征的聚集(Liu等人。2019年;Ying等人。2018年)
因此,为了补充GNN以更好地处理这些结构模式,我们提出了具有局部结构模式的图神经网络,简称GraLSP
这是一个将局部结构模式结合到邻居聚集中的GNN框架
- 具体地说,我们通过随机匿名行走捕获局部结构模式,随机匿名行走是能够以一般方式捕获局部结构的随机行走的变体
- 然后将走行投影到向量,以保留其基本的结构语义
我们设计了多种复杂技术的邻域聚合方案,以反映结构对特征聚合的影响
此外,我们还提出了基于路径和节点的两两邻近度来联合优化路径和节点向量的目标
广泛的实验表明,由于我们精心融入了结构模式,我们的模型在各种任务中的表现优于竞争对手
综上所述,我们做出了以下贡献
- 我们分析了邻域聚合方案,得出结论:常见的GNN在识别一些常见的结构模式方面存在缺陷
- 我们提出随机游动可以用来捕捉结构模式,并对其进行分析
- 我们提出了一种新的邻域聚合方案,该方案通过自适应的接受半径、注意力和放大来结合结构和节点属性
- 我们进行了大量的实验,结果表明,我们的模型将结构模式融入到GNN中,获得了令人满意的性能
2 Related Work
Graph Representation Learning (GRL)
将离散图形转换为向量,GRL已成为链接预测等任务的流行工具(Chen等人。2018)、社区检测(Wang等人2017年;Long等人。2019年)等
通常有两种类型的GRL方法,由不同的节点相似性概念定义
- 一方面,像DeepWalk(2014)和GraphSAGE(2017)这样的方法采用了由紧密联系定义的同质性、相似性的概念
- 另一方面,诸如struc2vec(2017)和Graphwave(2018)等方法将相似性定义为具有相似的拓扑结构
应该注意的是,虽然我们的方法捕获了结构模式,但像大多数GNN一样,它属于前一种类型,采用了同质性而不是结构相似性的思想
我们将在实验中更多地演示节点相似性的两个概念。
Graph Neural Networks (GNNs)
近年来,GNN(Scarselli(2008)、Bruna(2013)、Niepert(2016)、Kipf(2016))逐渐流行起来
最近的研究人员普遍采用邻域聚合的方法,即合并邻域内的节点特征来表示中心节点(Hamilton(2017))。
确定GNN和图结构之间的联系也很流行
- (Xu等人)2018)和(Morris et al.2019)证明了GNN和1-WL同构测试之间的等价性
- (Li,han和Wu 2018)展示了GNN和拉普拉斯平滑之间的联系
- 与前人的工作相比,我们的工作更多地集中在“局部”结构上
- 徐等人。2018)更多地关注全局图结构,例如图同构
Measuring Structural Patterns
以往关于测量结构模式的工作都关注于特征结构,包括最短路径和小图形(Shervashze(2009),Borgwardt(2005))等
此外,(Micali和朱2016)表明可以通过在图上匿名随机行走来重建局部邻域,这对我们的模型来说是令人惊讶和鼓舞的
这种匿名行走的概念被(Ivanov和Burnaev 2018)推广,他们提出了在匿名行走上嵌入图的方法
3 Model: GraLSP
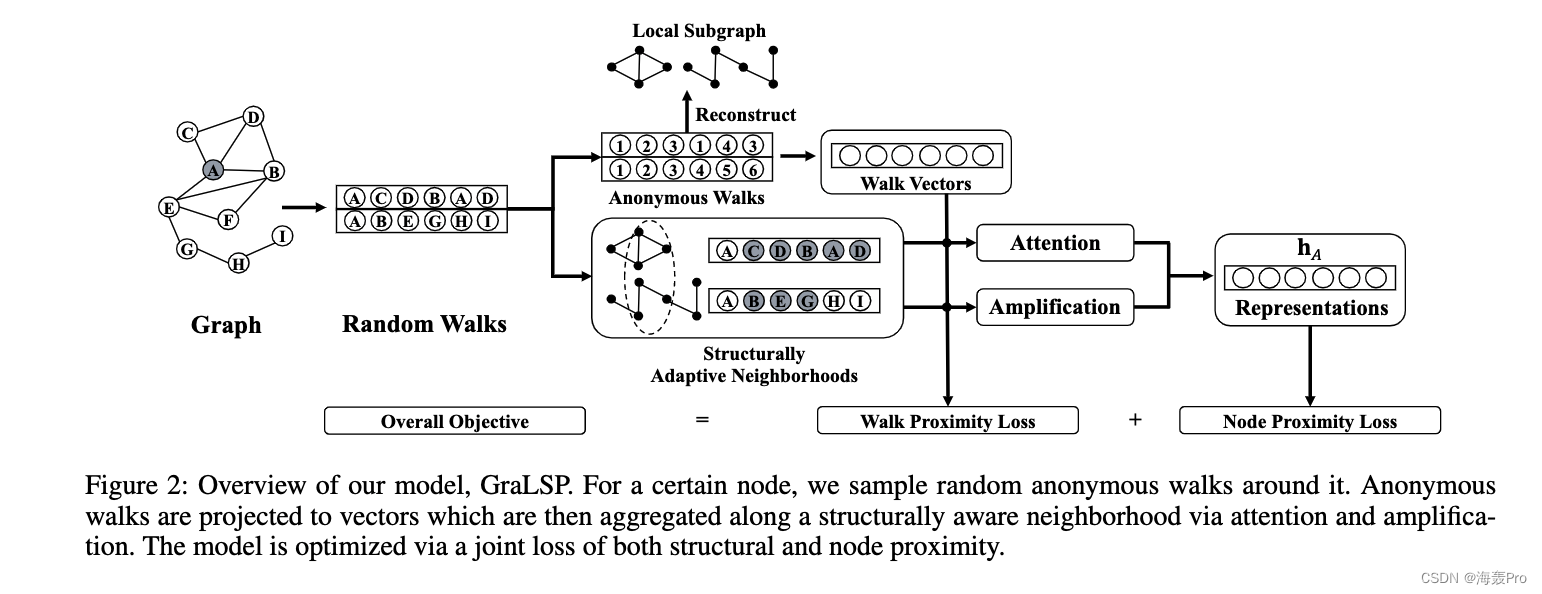
在这一节中,我们将介绍我们的模型GraLSP的设计,并在图2中进行简要的概述
3.1 Preliminaries
我们首先介绍与我们的问题相关的几个背景,包括图表示学习、随机和匿名行走以及图神经网络
Definition 1 (Graph & Graph Representation Learning)
给定一个图 G = ( V , E ) G=(V,E) G=(V,E),其中 V = { v 1 , . . . v ∣ V ∣ } V=\{v_1,...v_{|V|}\} V={ v1,...v∣V∣}是节点集, E = { < v i , v j > } E=\{<vi,vj>\} E={ <vi,vj>}是边集,图表示学习学习映射函数

h i h_i hi就是节点 v i v_i vi的嵌入
具体地说,GNN将它们的映射函数表征为迭代的
其中节点的表示向量是通过其邻域内的特征的聚集来计算的,这可以用以下等式来概括

许多流行的GNN,包括GCN和GraphSAGE,都可以用公式来概括
Definition 2 (Random Anonymous Walks) 匿名随机游走
给定 随机游走 w = ( w 1 , w 2 , . . . , w l ) w=(w_1,w_2,...,w_l) w=(w1,w2,...,wl)
其中 < w i , w i + 1 > ∈ E <w_i,w_{i+1}>∈E <wi,wi+1>∈E
w w w的 匿名随机游走 定义为

其中 D i s ( w , w i ) Dis(w,w_i) Dis(w,wi)表示 w i w_i wi首次出现在 w w w中时, w w w中不同节点的数量,即

比如 w = ( w 1 , w 2 , . . . , w l ) = ( 1 , 3 , 4 , 2 , 3 , 2 ) w =(w_1,w_2,...,w_l) = (1, 3 , 4, 2, 3, 2) w=(w1,w2,...,wl)=(1,3,4,2,3,2)
D I S ( w , w 1 ) = ∣ { 1 } ∣ = 1 DIS(w, w_1) = |\{1\}| = 1 DIS(w,w1)=∣{ 1}∣=1
D I S ( w , w 2 ) = ∣ { 1 , 3 } ∣ = 2 DIS(w, w_2) = |\{1,3\}| = 2 DIS(w,w2)=∣{ 1,3}∣=2
D I S ( w , w 3 ) = ∣ { 1 , 3 , 4 } ∣ = 3 DIS(w, w_3) = |\{1,3, 4\}| = 3 DIS(w,w3)=∣{ 1,3,4}∣=3
D I S ( w , w 4 ) = ∣ { 1 , 3 , 4 , 2 } ∣ = 4 DIS(w, w_4) = |\{1,3, 4, 2\}| = 4 DIS(w,w4)=∣{ 1,3,4,2}∣=4
D I S ( w , w 5 ) = ∣ { 1 , 3 } ∣ = 2 DIS(w, w_5) = |\{1,3\}| = 2 DIS(w,w5)=∣{ 1,3}∣=2 因为 w 5 = 3 w_5 = 3 w5=3, 而第一次出现 3 3 3是在 w w w中的第二个数
…
也就是看 w i w_i wi第一次出现的位置
我们将长度为 l l l的匿名行走表示为 ω 1 l , ω 2 l . . . ω^l_1,ω^l_2... ω1l,ω2l...根据他们的词典编排顺序
例如
- ω 1 4 = ( 1 , 2 , 1 , 2 ) ω^4 _1=(1,2,1,2) ω14=(1,2,1,2)
- ω 2 4 = ( 1 , 2 , 1 , 3 ) ω^4_2=(1,2,1,3) ω24=(1,2,1,3)
- ω 3 4 = ( 1 , 2 , 3 , 1 ) ω^4_3=(1,2,3,1) ω34=(1,2,3,1)
- …
匿名漫游和随机漫游之间的关键区别在于,无论访问的确切节点是什么,匿名漫游都描述了随机漫游的基本“模式”
例如,即使 w 1 w_1 w1和 w 2 w_2 w2访问了不同的节点
- w 1 = ( v 1 , v 2 , v 3 , v 4 , v 2 ) w_1=(v_1,v_2,v_3,v_4,v_2) w1=(v1,v2,v3,v4,v2)
- w 2 = ( v 2 , v 1 , v 3 , v 4 , v 1 ) w_2=(v_2,v_1,v_3,v_4,v_1) w2=(v2,v1,v3,v4,v1)
都对应于相同的匿名行走 a w ( w 1 ) = a w ( w 2 ) = ( 1 , 2 , 3 , 4 , 2 ) aw(w_1)=aw(w_2)=(1,2,3,4,2) aw(w1)=aw(w2)=(1,2,3,4,2)
3.2 Extracting Structural Patterns
我们首先介绍通过匿名遍历提取结构模式
对于每个节点 v i v_i vi,对长度为 l l l的 γ γ γ随机游走序列 W ( i ) W^{(i)} W(i)的集合进行采样
使用别名(Alias)采样,使得采样复杂度为 O ( γ V l ) O(γVl) O(γVl)
然后我们计算他们潜在的匿名行走的经验分布为

另外,我们把整个图 G G G上的平均经验分布看作

作为真实分布 p ( ω j l ∣ v i ) p(ω^l_j|v_i) p(ωjl∣vi)和 p ( ω j l ∣ G ) p(ω^l_j|G) p(ωjl∣G)的估计
Rationale of Anonymous Walks
有一些作品探索了匿名行走的性质。Micali(2016)表明,人们 可以使用匿名行走来重建局部子图
我们在这里给出这个定理。
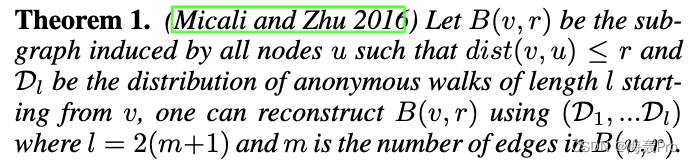
这个定理强调了匿名行走以一种高度通用的方式捕获结构的能力,因为它们捕获了完整的r-hop邻域
然而,考虑到在GNN中表示结构模式,这个定理是不现实的
例如,对于数据集Cora和 r = 2 r=2 r=2,我们得到 l = 118 l=118 l=118,这是不可能处理的
因为匿名行走的数量随着 l l l呈指数增长(Ivanov和Burnaev 2018)
相反,我们提出了一个更适合我们的任务的替代方案

这些推论表明了使用相当长的匿名步行来描述一般局部结构模式的基本原理
具体地说,对于包括Cora,Citeseer和AMiner在内的引文图,等式(2)的值约为10
由于篇幅限制,我们省略了详细的证明
此外,我们对我们认为有吸引力的匿名散步提供了直观的解释
直观地说,具有 k k k个不同结点的匿名行走 ω ω ω可得到一个图 G ω = ( V ω , E ω ) G_ω=(V_ω,E_ω) Gω=(Vω,Eω)
- 其中 V ω = { 1 , 2... k } V_ω=\{1,2...k\} Vω={ 1,2...k}
- 且 < i , j > ∈ E ω ⇔ ( j , i ) <i,j>∈E_ω⇔(j,i) <i,j>∈Eω⇔(j,i)或 ( i , j ) ⊆ ω (i,j)⊆ω (i,j)⊆ω
从这个意义上说,单个匿名行走是对底层图形的部分重建,它能够指示某些结构,如三元组
在图3中,我们以一个三元闭包为例展示了行走的直觉

3.3 Aggregation of Structural Patterns
在本节中,我们将介绍将结构模式合并到节点表示中
Representing Anonymous Walks
将匿名漫游表示为统计数据是不够的,因为漫游代表彼此具有不同相似性的结构模式
例如,我们会直观地认为 ( 1 , 2 , 3 , 1 , 4 ) (1,2,3,1,4) (1,2,3,1,4)与 ( 1 , 2 , 3 , 1 , 2 ) (1,2,3,1,2) (1,2,3,1,2)非常相似
因为它们都指示潜在的三和弦,但不同于 ( 1 , 2 , 3 , 4 , 5 ) (1,2,3,4,5) (1,2,3,4,5),因为没有指示三和弦
因此,由于我们希望捕获不同漫游序列的属性,因此我们通过嵌入表查找将每个匿名漫游表示为向量(以捕捉不同walks和结构的特性)

Neighborhood Aggregation
在这一部分中,我们将介绍如何聚合结构和节点级特征
具体地说,我们专注于如何在节点的局部结构模式的影响下聚合节点特征,而不是简单地使用拼接将它们聚合在一起
直观地说,我们认为结构对图上的信息聚合有以下影响:
- Defining Receptive Paths : 随机游走可以被视为可接受的路径,显示信息如何在图中流动(Liu等人。2019年)。因此,我们希望根据 v v v的随机行走来定义灵活的接受路径,或 v v v的“邻居”,而不是固定的1跳邻居
- Importance of Neighbors: 一般来说,邻域不会统一施加影响,而是表现出不同的力量。人们已经研究过,包括集团或密集集群在内的结构通常表明强烈的社会影响(Granovetter 1977),这应该被我们的模型所捕捉
- Selective Gathering of Information: 结构模式也可以表征对要收集的信息的选择。例如,生物网络中的酶共享独特的结构,从而能够选择性地催化生物反应(Ogata等人。2000)。
为了解决上述影响,我们设计了如下聚合公式。

其中
- w w w表示从 v i v_i vi开始的遍历
- w p w_p wp表示遍历 w w w的第 p p p个节点
- R e L U ( X ) = m a x ( 0 , x ) ReLU(X)=max(0,x) ReLU(X)=max(0,x)是 R e L U ReLU ReLU激活
- M e a n ( Ω ) = ∑ ω ∈ Ω ω ∣ Ω ∣ Mean(Ω)=\frac{∑_{ω∈Ω}^ω}{|Ω|} Mean(Ω)=∣Ω∣∑ω∈Ωω是平均池化
- ⊙ \odot ⊙表示元素乘法
- r w 、 λ i 、 w 1 、 q i , w 1 r_w、λ_{i、w_1}、q_{i,w_1} rw、λi、w1、qi,w1分别表示 w w w的接受半径、注意力系数和放大系数
- 此外, U ( K ) , V ( K ) U^{(K)},V^{(K)} U(K),V(K)表示可训练权重矩阵
我们将在后面详细介绍对应于上述影响的系数
Adaptive Receptive Radius
虽然每一次随机行走都可以被视为一条接受路径,但这种行走的性质意味着不同的接受半径
例如,如果行走访问了许多不同的节点,它可能会跨越到较远的节点,而这些节点可能不会对中心节点产生影响
另一方面,访问几个不同节点的遍历表示底层节点集群,这些节点都靠近中心节点
为此,我们提出了自适应邻域采样接收半径来解决这一问题
具体地说,游走 r w r_w rw的接收半径或“窗口大小”与其跨度呈负相关,即

其中
- m a x ( a w ( W ) ) max(aw(W)) max(aw(W))表示由walk w w w访问的不同节点的数目
我们构建 v i v_i vi的邻域,使得对于每个 w ∈ w ( i ) w\in w^{(i)} w∈w(i),仅包括半径 r w r_w rw内的节点,这形成了节点 v i v_i vi的自适应邻域
Attention
我们介绍了注意模块,以模拟邻居的结构模式所显示的不同重要性
具体地说,我们对 λ i 、 w 1 λ_{i、w_1} λi、w1建模如下

上式中部分符号定义与等式8一样
Amplification
我们引入了用于通道级放大的放大模块,或“门”,以对邻域内节点特征的选择性聚合进行建模
从形式上讲,我们将 q i , w 1 q_{i,w_1} qi,w1建模为:

其中
- σ ( X ) = 1 / ( 1 + e x p ( − x ) ) σ(X)=1/(1+exp(−x)) σ(X)=1/(1+exp(−x))是控制扩增规模的S型函数
- Q ( K ) , r ( K ) Q^{(K)},r^{(K)} Q(K),r(K)是可训练的参数
3.4 Model Learning
在本节中,我们介绍指导我们模型学习的目标
具体地说,我们设计了一个多任务目标函数,以同时保持两两结点之间的邻近性,并同时保持两两行走
Preserving Proximity of Walks
直观地说,如果两个匿名行走都经常出现在同一个社区内,他们应该描述类似的结构信息–相同的社区,反之亦然
因此,我们设计我们的步行近距离目标如下,

使得高度共现的游走被映射成相似的矢量
通过以这种方式约束漫游向量,我们赋予了漫游向量可以解释相似性的语义,这样我们将漫游向量合并到聚集中的操作是合理的
Preserving Proximity of Nodes
需要客观地保持节点邻近性,以便保持节点属性
我们采用(Perozzi、Al-Rfou和Skiena 2014)的无监督目标,但不排除其他目标。

Overall Objective
通过总结以上两个目标,我们将它们结合在一起

为了得到一个同时保持结点和成对行走之间的邻近性的多任务目标
我们采用ADAM优化器对TensorFlow的目标进行优化
4 Experiments
4.1 Experimental Setup
…
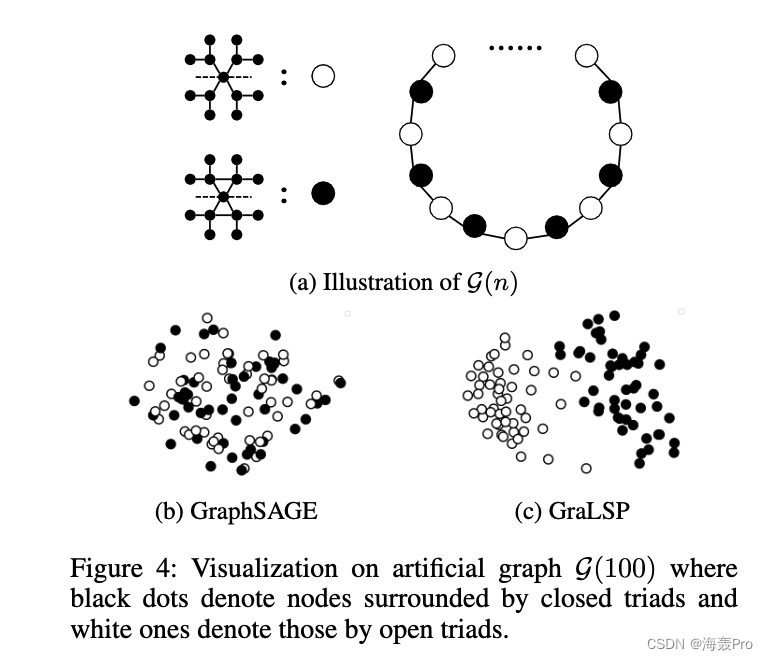
4.2 Visualization as a Proof-of-Concept
4.3 Node Classification

4.4 Link Prediction

4.5 Model Analysis

4.6 Visualization on Real World Datasets

5 Conclusion
我们提出了一个将局部结构模式结合到现有GNN中的GNN框架,称为GraLSP
- 首先分析当前GNN在识别局部结构模式(如三元组)方面的缺陷
- 然后,我们证明了匿名漫游是测量局部结构模式的有效选择,并用向量来表示它们,这些向量被结合到具有多个模块的邻域聚集中
- 此外,我们还提出了一种多任务目标,保持两两结点和路径之间的邻近性
通过充分考虑局部结构模式,我们的方法优于几个竞争基线
在未来的工作中,我们计划将本文扩展到具有更复杂的体系结构和更精细的局部结构表示的GNN
此外,对GNN中结构的解释肯定会提高我们对各种网络现象的洞察力
读后总结
2022/07/14 第一次阅读
感慨 作者的思路确实很好
GNN的缺点就是在聚合邻域的时候, 没有考虑到邻域结构的不同
作者在这里使用匿名随机游走来解决这个问题
因为通过匿名随机游走 可以重构节点的局部结构特征
先对原图进行匿名随机游走
得到游走序列, 然后将其转化为向量 u i u_i ui
利用这个向量,作为GNN的输入
同时从attention和amplification两个方法 优化原GNN架构
attention也就是GAT的思想,考虑不同邻域节点对中心节点的影响是不同的
amplification也就是:以对邻域内节点特征的选择性聚合进行建模(重要的放大其影响,相对不重要的,降低其影响)
得到 G N N GNN GNN的输出 h i h_i hi(也就是最终的节点 i i i的嵌入)
优化目标函数为:
其中
- L n o d e L_node Lnode利用节点连接性质(邻域)得到优化函数
- L w a k j L_wakj Lwakj则是根据匿名随机游走对应的向量属于同一社区的损失最优
细节肯定是没有怎么了解
大概思路有点懂
还是很佩服作者的,思路确实很棒!
论文读起来也很有条理
结语
文章仅作为个人学习笔记记录,记录从0到1的一个过程
希望对您有一点点帮助,如有错误欢迎小伙伴指正

边栏推荐
- 10 webapis that open the door to my new world
- Which do you choose between code coverage and test coverage?
- (板子)Trie树模板 AcWing835. Trie字符串统计
- 手动上传表单数据+图片文件功能
- (板子)AcWing 143.最大异或对
- sqlserver 通过链接服务器远程更新超时问题
- 2022-07-15 第五小组 孔海波 学习笔记
- uni-app - 解决 rich-text 富文本解析图片无法自适应宽高问题(图片超出屏幕宽度且不受控)
- Code change and invariance
- 多年前的一封邮件
猜你喜欢

(伟大的dfs)洛谷P4961 小埋与扫雷

vlan是什么?如何划分vlan?如何实现vlan?使用vlan的优点!

8 about promise Then and promise Catch interview questions, we must master

Chapter 2人口数据分析

Recursive function, factoring

Cadence学习之路(六)元器件封装绘制
如何發布自己的npm包

聚苯胺基MOF纳米复合材料(PANI/MIL101)|硅藻土@NH-MIL-53(Al)纳米复合材料|金属有机框架ZIF8/聚多巴胺

【D1 Dock Pro开发板】快速上手手册
 [email protected]纳米酶|PCN/MAPbI3钙钛矿材料|
[email protected]纳米酶|PCN/MAPbI3钙钛矿材料|金属-有机骨架材料/嵌段聚醚酰胺(ZIF-8/PEBAX-1074)|[email protected]纳米酶|PCN/MAPbI3钙钛矿材料|
随机推荐
JUC joint contracting - countdownlatch
金太阳国信证券安全吗?可以在上面开户吗?
[Internet of things] basic knowledge of WiFi (II) [see the comment area to get information]
JVM常见面试题总结
线程同步小结
Recursive function, factoring
如何判断一款ERP管理系统的好坏
Comment publier votre propre paquet NPM
Perspective of 100 listed companies on the Beijing stock exchange: the new world of middle-aged men of science and technology
AI应用启示录:安防市场的蜜糖和砒霜
SQL也能做AI ?没错!MLOps Meetup V3 回顾|OpenMLBD+SQLFlow+Byzer
金属有机骨架复合物UiO-66-NH2/MoS2|PPS-ZIF-8-BSA|PVA/UiO-66|[email protected]|
现代的应用安全需要纵深防御v
link引用和@import引用的用法和区别
二氧化钛纳米片负载MIL100(Fe)|bmim][Tf2N]离子液体(IL)负载UiO-66-PEI(齐岳)
Source code analysis of OSCache framework
Security access of UDS common services 0x27
【D1 Dock Pro开发板】快速上手手册
巯基化金属有机骨架吸附剂([email protected])|[email protecte
atcoder ABC 232 B~E题解